
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
重型长途车辆动力转向系统设计
艾米莉亚·斯奥瓦丝 艾瑞克·班克西斯 西欧·霍夫曼 汉克斯·沃特 马丁·史戴巴弛
(艾恩德霍芬理工大学,控制系统技术组,机械工程部)
摘要:通常,存在于重型车辆中的所有辅助装置(例如,动力转向泵,空调压缩机)均是由发动机驱动的系统,这对它们的性能施加了很大的限制。输出(例如,速度,温度)和能量消耗由发动机速度决定,而大多数辅助系统的需求不与发动机速度成比例。处理过载甚至更坏情况的组件正是因为这一行为,将进一步显著降低整体效率。在同步设计步骤中,拓扑,组件尺寸和辅助设备的控制算法仍然是未知的,这些我们又该如何选择?当车辆需要集成所有的一般最佳设计而不是最佳系统或子系统设计时,这变得尤其重要。为了克服顺序设计方法的缺点,本文展示了应用于重型车辆中的动力转向系统的技术、拓扑、尺寸和控制的精确组合方式。展示出了六种可能的拓扑和部件的最佳尺寸的模型,并将之作为内燃机和动力转向泵之间的传动比确定的参考。接下来,对控制参数进行灵敏度分析,并且在用于重型长途车辆中使用的动力转向系统的适当拓扑上呈现视图。
关键词:最优设计,动力转向泵,电动(辅助)转向
1.介绍
为减少燃料、排放、成本或提高性能而对车辆的各种部件进行电动化的可行性研究是逐渐增多的研究课题。 随着混合动力电动车(HEV)的普及,这使得从相对低效率部件(液压或发动机驱动系统)到更高效部件(电动机械,电机(EM)驱动)的转变成为可能。混合动力电动车(HEV)是指一个或多个电机(EM)与一个能量载体组合成为燃烧发动机(CE),也可以称为混合动力车辆(HV),即由两个动力源组合而成。根据实际情况,在混合动力和常规车辆中,辅助装置都会消耗大量的燃料。 先前的研究文章说明了用于各种商用车辆的辅助设备的功耗估计,但是这些论文都没有解决这些单元的最优设计的问题。 这意味着拓扑、技术、尺寸和控制算法的最佳选择问题并没有被解决。【16】例如,重型卡车的辅助设备的能量消耗在3%到11%之间,小型货车的辅助设备的能量消耗在8%到15%之间【10】;对斯堪尼亚卡车数据显示能量消耗的比例是5%至7%【12】,而美国理事会在2010年的一份报告显示,这种消耗可以高达公共汽车总功率的25%【17】。当然,因为不同辅助装置的功率要求不同,会使应用面积、功能、环境因素(例如,温度)和不同的占空比等数据产生变化,但是我们可以推断各种消耗所占比例。然而,预测这些消耗的比例时,不考虑驱动辅助装置所需的能量,这点对新系统的开发至关重要。 因此,确定这些辅助设备的最佳设计结果既是一个具有挑战性的研究课题,也关系到制造商的商业利益。
如图1所示,在所有重型车辆的辅助设备中,正如哈迪克斯和奥康佛在2002年和席瓦斯等人 在2013年的著作中所说,动力转向泵在减少燃料消耗方面具有最大的潜力【6】【15】。在这些教授的著作中,说明了从发动机中移除动力转向泵之后,通过交流发电机将其添加回传动系统的好处。在胡、夏尔、陈、刘等人的最近的著作中,介绍了几种用于转向系统的控制器的设计,尤其是用于客运车辆中的电动助力转向系统(EPS)【2】【4】的设计。这些控制器是基于先前给定的条件(即拓扑、技术和尺寸)构建的,并且旨在改善转向性能,驾驶员的转向感觉等等。最近,对主动力系部件的研究表明【7】,如果将拓扑结构、技术和尺寸都考虑到控制器设计中来,之前提到的由费西等人定义的顺序设计方法,则还有改进的余地。作为客运车辆的替代解决方案,凯米穆勒等人于2007年提出了电 - 液压转向系统。这种新的转向系统,与传统的液压动力转向系统相比,按照NEDC(新欧洲驾驶循环指标)来测量,驾驶循环的燃油消耗量减少了75%。但是这些著作并没有解决如何为常规和混合动力车辆的转向系统及其子系统选择最佳的拓扑结构和尺寸的问题。
图1 简化的转向系统示意图
在本文中,首先通过对对转向系统的分析,开发了六种配置(包括常规液压泵,电驱动液压泵,电动转向系统和从这些系统导出的更复杂的配置),并且为选择最优的组件尺寸定义优化问题。 然后,计算泵内和各种驱动循环中的各种恒定流量的燃料消耗。 最后,基于所呈现的结果,根据特定车辆类的适用性指表对于每个拓扑结构进行分析研究并且得出结论。
2.转向系统的优化设计
从一般的角度来看,混合动力车辆的最佳设计问题构成了一个具有极大的设计空间的多目标优化问题,具有多学科性质【7】。 这里可以特定于转向系统,如图2所示,并将下列各部分进行具体定义【7】。西蒙斯对于这里考虑的卡车辅助设备的功耗提出,在主要是长距离使用的情况下,功耗将会累加4%。
图2 重型(混合动力)车辆的转向系统设计问题
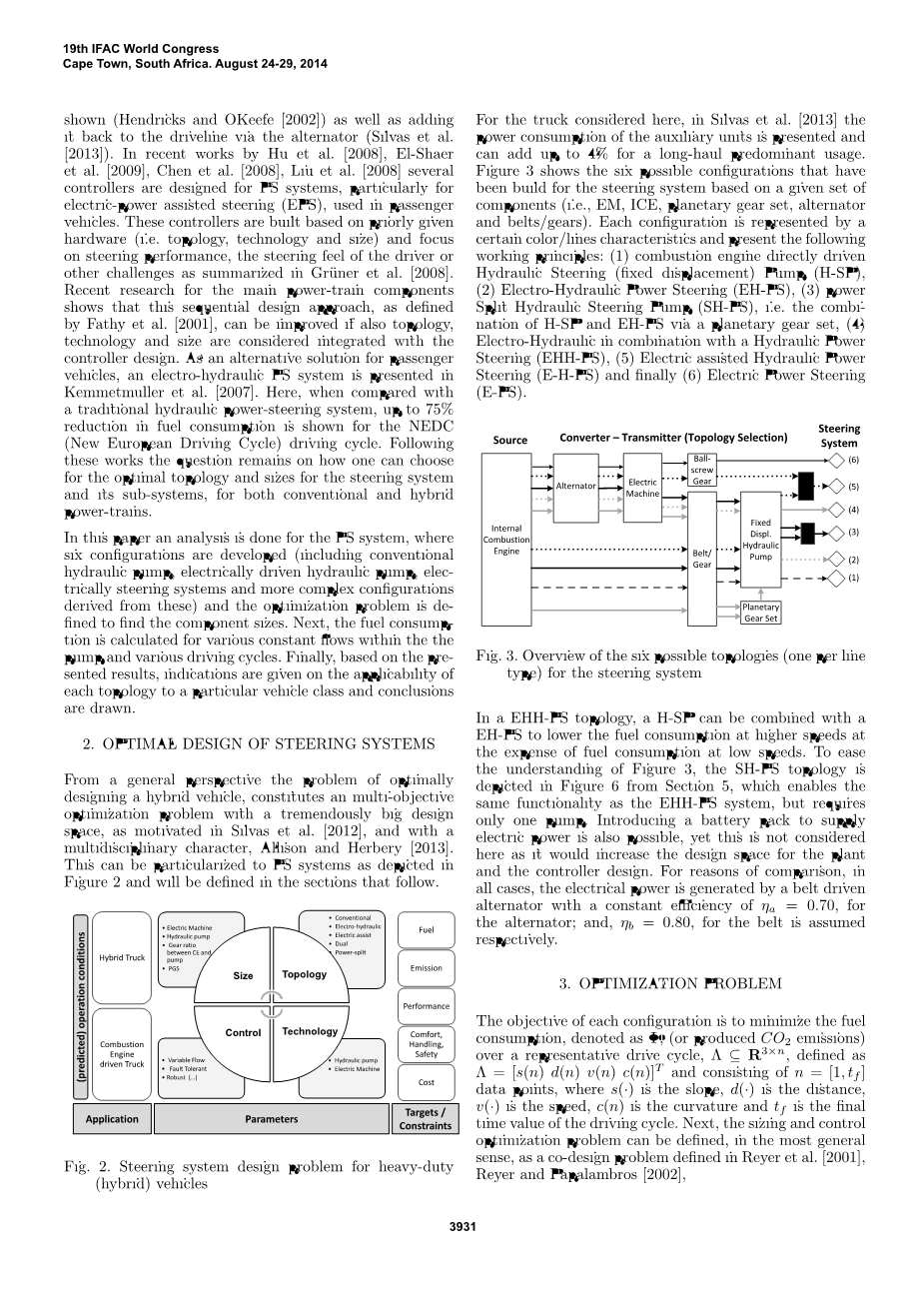
图3表示出了基于给定的一组部件(即电动装置,内燃机,行星齿轮组,交流发电机和皮带/齿轮)为转向系统构建的六种可能的配置。 每个配置由一定的颜色或线特性表示,各自的工作原理如下:(1)内燃机直接驱动液压转向泵(H-SP),(2)电动液压动力转向(EH-PS) ,(3)动力分流液压转向泵(SH-PS),即通过行星齿轮组的电动液压助力转向装置和液压转向泵的组合,(4)电动液压与液压动力转向(EHH-PS) ,(5)电动辅助液压动力转向(E-H-PS),(6)电动转向(E-PS)。
图3转向系统的六种可能的拓扑(每个线型一个)的概述
在EHH-PS拓扑中,H-SP可以与EH-PS组合用以在低速下以燃料消耗为代价降低更高速度下的燃料消耗。 为了便于理解图3,在图6中从第5部分描述了SH-PS拓扑,其仅需要一个泵就可以实现与EHH-PS系统相同的功能。 引入电池组以供应电力也是可能的,但是这里不考虑这种情况,因为这将限制用于设备和控制器设计的设计空间。 为了比较得到更好的结论,规定在所有情况下,对于交流发电机,电功率由具有恒定效率eta;a= 0.70,对于皮带驱动交流发电机,eta;b= 0.80。
3.优化问题
每个配置的目标是在具有代表性的驱动周期中将燃料消耗Phi;(或产生的CO2排放)最小化,Lambda; sube; R3*n,定义为Lambda;= [s(n) d(n) v(n) c(n)] T并由n = [1,tf]个数据点组成,其中s是斜率,d是距离,v是速度,c 曲率,tf是驾驶循环的最终时间值。 接下来,尺寸和控制优化问题可以在一般概念上定义。【4】【13】
这里(·)d表示参数大小变量,(·)c表示控制变量。根据拓扑,表1中详述的设计变量(xc,xd)和要最小化的目标Phi;c,d 与燃料质量流率的·mf。
在表2中,描绘了针对每个拓扑的设计变量的集合。 不等式约束的集合gd,c和等式约束hd,c由系统的物理性质决定,并且它们必须为图3中的每个配置定义。示例中,对于复杂拓扑,在结果部分表示出。 当xcne;empty;时,电动泵的输出流量(fh和fn)可以改变。 例如,当在高速公路上行驶时在方向盘处没有输入时,可以减少流量以节省能量。
理想情况下,该问题可以通过同时优化来解决,如果可以的话,该问题将为以高计算时间为代价搜索的控制和大小参数提供全局最优值【13】。接下来,这个问题被分为嵌套(双层)优化问题,其中最佳尺寸由以下公式求得:
控制问题则由下列公式求得:
为了避免优化算法陷入局部最小值问题的出现,无导数优化算法最适合解决这些设计问题,这些算法的缺点是它们通常需要大量的计算时间。为了克服全局最优解的非线性收敛问题,对于大小问题,我们使用对设计向量的强力搜索求解公式(6)。然后,使用相同的方法,以嵌套方式,对于Xd的每个选择集合,针对fh和fd的离散网格求解控制问题。在使用强力搜索方法时,设计空间被细分为每个维度的等距网格,并针对该网格中的所有可行点评估目标函数。虽然这种方法不会提供可以输出的、真正的全局最小值,但它将使人们能够在不同的设计之间进行比较。此外,该方法是简单的,适用于低维度优化问题,其中仅需要指示值,并且是表示完全理解问题的复杂性的良好起始方法。同时可以给定大量的设计变量,对于最优设计问题的见解应该以帕累托分布形式给出。这将有助于了解最佳设计集,并为设计师留下一定的自由空间。
4.功率转向拓扑的建模
通常,存在三种类型的泵模型:(i)基于测量数据的经验模型在需要特定的现有泵的精确表示时特别有用;(ii)物理模型,有时对于特定的情况并不是特别精确但更均匀,因此对于新的泵开发更有用;(iii)分析(或系数)模型,其可以被看作是前两者的组合。 在这种最新的模型类型中,仅使用有限量的测量数据来确定由物理关系产生的系数。
由于来自实际泵的可用数据的有限,所以将构建分析模型,包括泄漏损失(由叶片和壳体之间的小间隙引起)和扭矩损失T1(由摩擦引起)。泵所需的有效扭矩Te和液压机械效率eta;hm定义为:
式中:Ti是理想的泵转矩,是压力和角速度的函数。 泄漏流量q1和摩擦扭矩(以及体积和液压机械效率)取决于操作条件,即
式中:Delta;p是泵的压力差,theta;是工作温度,mu;是流体的动态粘度。
水力机械效率eta;hm和从机械功率到液压功率的总效率eta;tot进一步从四极符号推导为
式中:Pm是机械输入功率,Ph是泵的液压输出功率,D是瞬时位移体积,eta;v是体积效率。 接下来,该结构由体积和水力机械效率组成,用于描述所有拓扑结构的固定位移泵【14】。
这些PS系统的数学描述被构建和验证。 使用线性缩放进行EM的缩放。 当没有要控制的变量时,最佳设计问题归结为一个自由度优化问题(PSP,E-HPS和EPS拓扑)
4.1 Duty cycle
对于每个拓扑,设计优化问题的解决方案取决于PS系统的占空比。 顺序地,占空比取决于驱动周期,因此用于内城市驾驶的最佳解决方案不总是等于高速公路驾驶的最优解决方案。 对于这里给出的结果,集中在长距离使用,在完全装载的拖拉机 - 拖车上使用测量的混合循环,其结合各种路段,以主要(85%)高速公路行驶。
5.最优化尺寸和控制的仿真结果
5.1液压泵的可变流量控制
EH-PS,SH-PS和EHH-PS拓扑结构实现了油流的可控性,这意味着电驱动泵的输出流量phi;可以根据行驶条件而变化。例如,当在高速公路上行驶时在方向盘处没有输入时,可以减少流量以节省能量。在某些行驶条件下的最小流量(fh,fn)由于安全原因而受到限制,原因是在从待机模式加速时泵需要一段时间才能输送所需的流量和压力。由于流量降低能力是这些拓扑的一个重要优点,因此已经通过不同的例子表明被包括在内。在前三个使用案例中,当在高速公路和国道上行驶时,流量是变化的:(流量I)fh = 11,fn = 16,(流量II)fh = 6,fn = 16和(流量III)fn=6,fn = 11。用于模拟的驱动周期上,这些流量在整个周期中是足够的。第四个案例中用作当流量可以根据方向盘输入精确地变化时可实现的下限。该用例(流程IV)应用于所有驱动周期,可以用下列数学方式描述:
其中phi;r为所需流量。
5.2每拓扑的帕累托分析
对于给定的第一拓扑(H-PS),使用该方法的结果如图4所示,其中可以观察到最低可行齿轮比导致最低平均燃料消耗。 由于该拓扑没有控制自由度,求解(1)归结为一个自由度优化问题(2),其中xd = {i1},并且由
式中:qmin是最小流量,omega;i是CE空转速度,psh是转向室压力,k1是泄漏流动系数。 对于该优化,每维的网格大小为20,并且仿真时间为15分钟。 在某些行驶条件下的最小流量受到安全原因的限制。假设变量流只能在公路或国道上行驶时使用,因为在其他道路上,转向占空比要高得多。当更多的变量要优化时,可以找到用于设计解决方案的Pareto边界集合。这意味着不可能为一个设计变量选择更优的解,而不使另一个设计变量更糟。在图5中针对第二拓扑EH-PS描述了这样的结果。
图4.帕累托前端在H-SP拓扑中实现最佳齿轮选择
这个优点本身是一种结果,并且可以帮助产生燃料消耗将如何随着齿轮比或电动机功率的增加而改变的预测。 对于这种情况,可以观察到,随着EM功率的增加,还需要增加所使用的齿轮,以便保持低的燃料消耗。
图5.关于最佳燃料消耗的EH-PS拓扑的最佳尺寸选择
当将这些结果与常规转向系统的燃料消耗进行比较时,表明电动液压助力转向系统仅在有效地应用可变流量(流量IV)时才是有益的。 更具体地,双能量转换降低了整体效率,并且电动机必须被固定尺寸从而为使得其能够在最坏情况下提供足够的功率,即高转向压力,而大多数所需的液压压力要低得多。 这意味着电动机上的扭矩需求在大多数时间是相对低的,并且电动机不在其高效率区域中操作。 对于这种使用情况,电动机/控制器的平
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[138447],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

