
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
轨道引导机器人的运动学设计方法
引言:对于专用机器人手臂,如轨道式压载水箱检查手臂,具体需要需要特殊设计。目前,没有办法有效地设计可以处理不可量化要求的机器人手臂。在本文中,提出了一种用于设计和评估移动平台上的操纵臂的运动学的有效方法,并且在有限的空间内具有一定的达到要求。首先,运动臂结构的设计空间通过一组设计规则进行分析和缩小。第二,基于例如相对位置和对称性来确定和减少工作空间中的关键测试位置。第三,使用一个迭代方法来解决逆运动学问题的算法,使用末端执行器上的虚拟弹性扳手将候选结构控制到其期望的姿态。该算法针对缩小集中的每个所需的末端执行器位置评估剩余的候选操纵器结构。这种方法大大减少了与强力方法相关的搜索空间,并产生了一种保证满足规范的设计。该方法适用于轨道引导机器人的压载水箱检查用例。所制造的机械手设计已经建成,并且在压载水箱复制品中已经成功地评估了概念证明。
- 介绍
设计操纵臂的运动学结构没有直接的方法。对于某些具有几度自由度(DOF)的机械手,结构变得明显;例如,龙门架或xy台。然而,当任务空间变得更加复杂时,需要更多的自由度。由于可能结构的数量随着关节数量呈指数级增加,所以使用启发式方法或强缩减集来生成和评估设计。对于已知的静态环境,设计操纵器有一些实用的指导。
然而,当环境变得更加复杂时,这些方法不能保证所有必需的末端执行器姿态都可以实现。通过增加连接数量来增加操纵臂的冗余可能有所帮助,但是会出现这些问题。这样的选择通常由人类设计师依靠洞察力和经验来做出。启发也可以从大自然中获取,但这也是一个依赖人类设计者识别和翻译生物设计为机器人设计的试错过程。
可用的机器人手臂不符合目的的要求。例如,库卡轻型机器人[1]和通用机器人[2]的UR5具有单独的控制箱和质量过大。来自Igus [3]的Robolink是一个最大为5DOF的电缆驱动机器人手臂。来自Festo [4]的气动仿生处理助手灵感来自于电子干线,不适用于压载水箱(BWT)内的导轨,而Kinova [5]的JACO2尺寸不符合用例。特别的目的,操纵器臂如压载水箱定制设计是必需的。 另外,确定机器臂的运动结构的有效方法,以保证满足要求,似乎不存在。 几篇论文着重于工作空间的形状和体积[6,7],将自己限于三个旋转关节[8,9],或者给出了机器人操纵器设计的一些一般性考虑[10,11]。
因此,创建了一种产生和评估运动学结构的新方法,导致保证达到所需末端效应器姿态的运动学结构。 本文介绍了设计和评估机器人手臂运动学结构的通用结构化方法,并将此方法应用于具体用例来说明其优点。
1.1概要
在第 2,介绍了该方法。 首先说明机械臂的运动学建模。 此后,将分析候选机械手结构和工作空间,然后通过利用对称来减少测试位置的数量。 最后,描述了用于评估候选机械手结构的算法。 该方法适用于第二节压载水箱检查机器人的用例情况。 3.第4节介绍了模拟结果。 5,本方法适用于该用例的硬件原理证明。 该方法在Sec。 6和Sec。 7,得出结论。
- 原理
在本节中,提出了提出的设计动力学结构的方法。 该方法的主要思想是巧妙地生成针对操纵器末端效应器姿势子集进行评估的候选运动学结构的子集。与常规工作空间分析相反,考虑到末端执行器的方位。候选结构的数量变得非常大,当自由度增加时爆炸。
通过分析可能的结构,可以减少所谓的设计规则,显着地减少候选结构的集合。例如,具有共线旋转轴的两个相邻的旋转接头产生永久的奇异雅可比。同样的策略可以应用于测试姿势,或者终端执行器的位置和方位。特别是对于轨道导向机器人,这套测试姿势可以大幅度缩小。
构建可以适应要测试的特定候选结构的运动学模型。使用该模型,已经开发了一种算法来评估候选结构是否可以以系统的方式达到所需的姿态。由于通常没有封闭形式的解决方案[12,13],证明在一定的结构中,一个姿势是可以达到的,算法迭代地尝试通过虚拟空间弹簧在一定的限度内达到最终的姿态,弹性扳手“,在末端执行器和所需的姿势之间。实现了提供固有奇点处理能力的标准雅可比转置技术[14],用于计算弹性扳手的关节扭矩。
2.1运动模型
候选操纵器被建模为串联运动链。 均匀矩阵Hj i是从帧Wj中的点到帧Wi的一般坐标变化
旋转矩阵Rj i和pj i是以Wi表示的Wj的原点的坐标。 这个同质矩阵描述了身体j相对于身体i的相对构型。 对于串联运动链,这些相对配置可用于使用链条规则来获得末端执行器相对于惯性框架W0的配置
其中qi表示联合变量, 扭曲,是刚体速度的泛化。 在几何学上,它们是与Lie组SE(3)相关联的李代数se(3)的元素。 扭曲是独立于配置H的描述,并具有纯粹的几何解释。 通过应用Mozzi定理,任何刚体动作可以表示为围绕轴的旋转和沿同一轴的平移。 因此,任何扭曲都可以写成
当
可以证明,末端执行器扭转是相对扭曲的总和,即关节的贡献
为了描述刚性机器人或通用刚性机构的运动学,我们需要对待物体之间的连接。 该连接的特征在于运动对或接头。 一个1DOF运动对或联合限制了具有独特扭曲的两个物体的相对运动
当T是恒定单位扭曲。 使用方程式 (5)和(6)及以下符号:
终点效应可以被表示为:
其中J(q)表示几何雅可比,雅可比的列是以帧W0表示的单位曲线。 第i列对应于在联合i处单位角速度产生的末端执行器扭转,而其他固定。 扭曲的双重空间是扳手的空间,是力量和速度的六维推广。 通过功率连续性,WTfrac14;s_q,可以看出,关节扭矩s可以用
有关机器人几何建模的更多信息,请参见参考文献。 [13],[15]和[16]。
2.2情景简化。
通常,机器人臂的工作空间相对于固定基座来表示。 对于一个轨道安装的系统,可到达的工作空间更复杂,因为基座能够沿着轨道移动。 简化此方案很有用。 场景包括一组期望的末端执行器姿势和轨道系统,机器人的基座可以在该系统上自行定位。 可以利用场景的某些方面来获得一个简单而又足够的模型。 例如,轨道可以由安装成与墙壁的大部分平行。 然后可以定义终端执行器的一组有限的目标姿势,需要对可达性进行评估。 必须认识到,只有从机械手的底部到所需的内力器姿态的相对位置和方向是相关的。 因此,通过识别所需的末端执行器位置和选择基础位置,可以获得有用的相对姿势集合。
2.3算法。
该算法试图找出给定机械手和测试位置的逆运动学解。 一般来说,没有封闭形式的解决方案; 完全可以有一个或没有解决方案。 因此,如果可能,开发一种算法来朝向期望的姿态进行迭代。
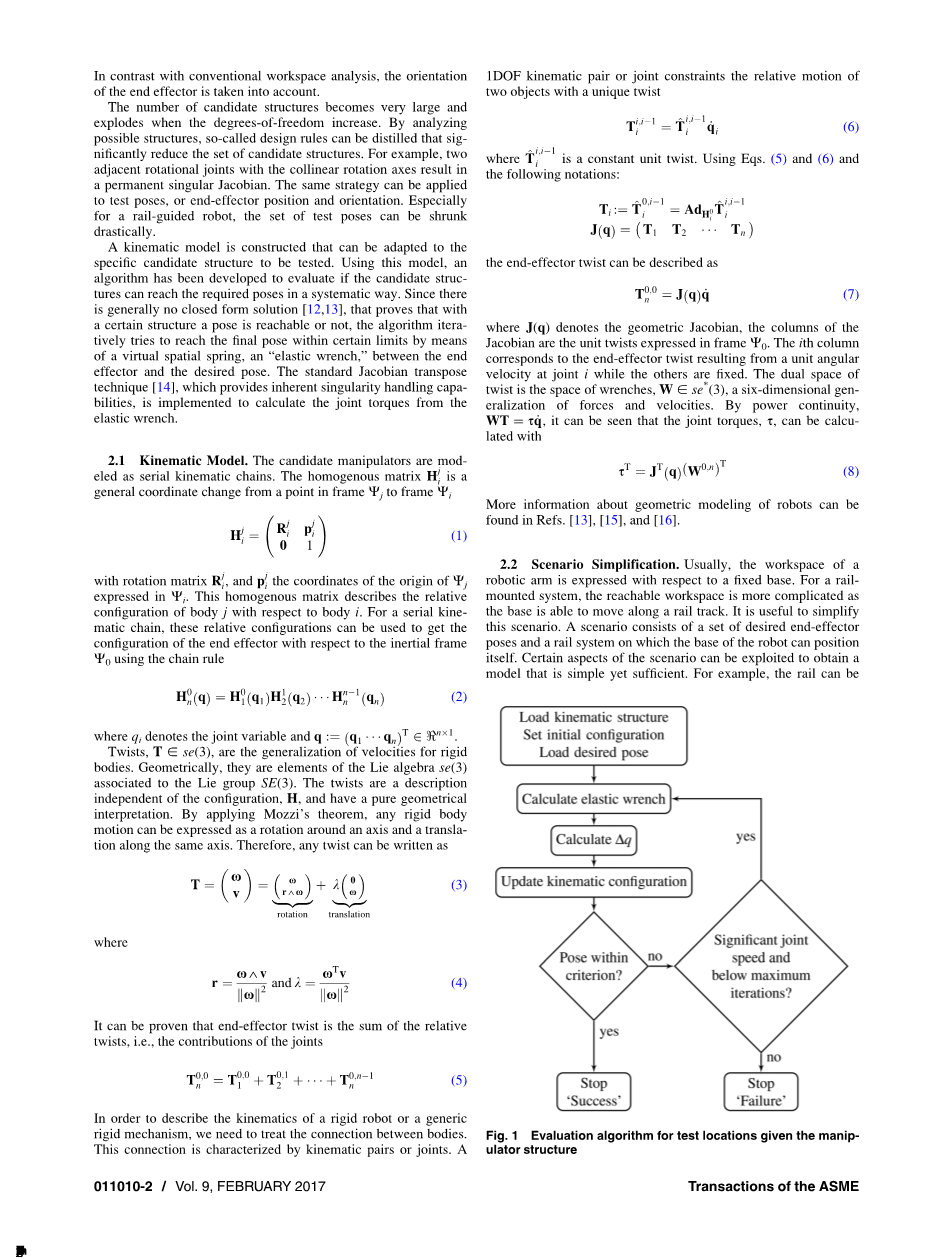
在图 1,介绍了如何使算法尝试解决特定测试位置和操纵器的反向运动学问题的流程图。 该算法针对所提供的每个操纵器结构针对每个测试位置重复此操作,并生成关于结构性能的报告。 首先,算法加载第一个操纵器结构,初始配置和第一个测试位置。 然后,使用正向运动学计算末端效应器姿态,并且相对于所需姿态的相对配置,He d,使用
相对旋转矩阵Re d和距离,以终端执行器坐标表示,pe d。当末端执行器姿势处于其所需姿态时,He d = I4。
为了将末端执行器移动到所需姿势,虚拟空间弹簧连接在它们之间。末端执行器和所需姿势之间的差异由该弹簧转换为作用在末端执行器上的弹性扳手。
基于Fasse和Broenink [17]的以前的工作,Stramigioli [15]提出了两个刚体之间的几何弹簧连接的完全无坐标的配方。代替在两个刚体之间连接空间顺应性,在所提出的算法中,它连接在末端执行器和期望的结束姿势之间。换句话说,所需位置的刚体可以被认为连接到固定的世界。作用在端部执行器上的扳手,由相对配置和几何弹簧产生的末端执行器坐标表示,可以使用
图:两级臂概念,磁铁作为中端执行器,锁定在墙上。 本研究仅考虑大回转手臂。
使用标准雅可比转置技术(Eq。)计算模拟该虚拟刚度所需的关节扭矩。(8)
与操纵器雅可比,J和伴随变换,AdHe 0,在惯性框架中表达末端效应器扳手We。 该关节扭矩设定为与用于更新运动结构的关节角度的增加成比例
这些新的关节角度决定了机械手的新配置,并用于再次计算相对配置。在下一个迭代步骤开始之前,算法对此步骤执行一些评估。如果末端效应器姿势在所需姿势的预定余量之内,则算法将该测试位置标记为“成功”,并移动到下一个测试位置。另一方面,如果超过最大迭代次数或方法进展不足,则max(Dq)低于阈值,则算法将该测试位置“失败”标记并移动到下一个测试位置。否则,执行下一个迭代步骤。当评估所有测试位置时,算法继续下一个候选操纵器结构,直到评估所有操纵器。为了评估,为所有操纵器及其测试位置存储附加数据。例如,可视化操纵器和雅可比的关节角度可用于确定操纵性度量。
3.机构的实现
图2应用于压载水箱检查机器人的操纵臂的设计的使用情况。
3.1用例场景:压载水箱检验。
大型船舶配备有压载水箱(BWT),可以填充压载水箱,以增加其稳定性,并平衡船舶,例如卸载货物。 由于显而易见的原因,需要频繁的检查,清洁和修复涂层[18]。 截至目前,船东有义务将船舶送往干坞进行维修,导致船舶暂停使用,造成船东费用高昂。 由于坦克的结构复杂以及管道,楼梯和人孔等附加障碍物,BWT的维护自动化是很困难的。 在以前的研究中,Christensen等 [19,20]表明,轨道引导机器人系统潜力最大。
对于BWT的检查,需要一些接触测量,如干膜厚度[18,21]。 因此,机器人应配备机器人手臂,可以在内墙进行所需的测量。 Borgerink等人 [22]指出,由于拟议铁路的合规性,单个操纵臂实际上将不能满足要求。 双级配置解决了主臂的精度问题,见图。 大型冲击臂将第二臂的底部固定在内壁上。 通过该第二臂确保定位精度,放宽对最大程度操纵臂的要求,其中运动学设计是所提出的设计方法的用例。
3.1.1要求
大型中风操纵臂的要求既具有量化性和描述性。例如,操纵器应该是轻便的,到达内墙上的所有“测试位置”,并能够折叠到最小的体积,因为它应该通过检修孔。双级概念可以放松大行程臂的定位精度要求。重要的是,第二操纵器的基座是永久电磁体,垂直于壁放置;高达5deg的偏差被认为是可以接受的。第二阶段的第一个关节与磁铁共线。因此,端部执行器围绕垂直轴线的角度是无关紧要的。短行程臂的距离为10cm,磁铁定位精度为5mm。由于磁体围绕其纵向轴线的取向是无关紧要的,所以需要最小的5DOF。为了避免障碍物,如管道和轨道本身,需要一些冗余。因此,将设计和评估6DOF操纵器。
3.1.2情景简化
该情景由实验罐给出,其尺寸从计算机辅助设计(CAD)得知。一个模块化的轨道系统安装在罐内。以实例为基础说明将实验槽的坐标映射到相对位置的过程。图3示出了在不同隔室中在轨道上具有两个任意起始位置的实验槽的剖视图。末端执行器必须能够在根部位置A处到达测试位置1-6,而在B处可以到达罐位置7-9。当所有油箱位置在其相应根部位置的框架中表示时,见图1。如图3(a)所示,获得所需的相对姿势。请注意,根位置B的方向与A不同。拐角的坐标是从油箱的CAD图纸获得的。使用角的坐标,表面法线的方向和拐角的偏移距离获得中间端部执行器的所需姿态。短行程被认为具有半径为100mm的工作空间;该距离将用作偏移量。机械手基座姿势是从CAD模型获得的;轨道上的位置使得到测试位置的距离最小化,并且方向由轨道上的位置定义。从实验槽中获得一组303个相对姿势。由于BWT的重复几何形状,许多姿势是相似的。当两个姿势在经验上确定的彼此之间距离为4毫米和1度之间时,它们被认为是一个,另一个从组中移除。剩余的169个相对姿势将被用作运动结构的最小性能标准。图4显示了测试罐的测试位置的减少。
3.1.3机械手候选结构。
机械手的运动学结构基本上是交替的连杆和连接件的链条。 两点之间的最短距离是直线。 因此,选择机械手的结构,使得操纵器在被拉伸时接近直线,使所需材料最小化并由此重量。 由于考虑到执行器和机械连接,已经决定将接头限制在轴向,“A接头”,垂直于轴向的接头“P接头”和“X接头”正交 到轴向和前一个P接头。
用于生成模型的强力方法是为每种可能的联合类型组合创建一个模型。 通常,对于具有三种类型关节的nDOF系统,这将产生3n的可能性。 对于假设的6DOF系统,这产生729个可能的组合。 大多数结构是无关紧要的 通过利用轨道引导机器人的要求和性能,以下设计规则将消除大多数型号:
图:减少实验压载水箱的169个测试位置
(1)末端执行器的纵向取向是无关紧要的。 所以最后一个联合不应该是A联合。
(2)对于第一关节,X或P关节是不利的。 它们的范围受限于防止与基座碰撞。
(3)具有共线轴的两个后续关节引入一个永久的奇异雅可比。
(4)A关节,X和P关节有效地相等。
(5)为了在末端执行器处允许最大旋转灵巧度,同时保持最大可达性,前一个关节必须是A关节。
最后一条规则是第一条的结果;如果最后一个联合可以是A联合,在上一次联合之前执行A联合是没有意义的。
在应用这些“消除规则”之后,只剩下五个模型;这些如图1所示。完整的运动学模型还需要链接长度,使用以下设计规则。从所需工作空间,在基础和所需姿势之间获得最大距离为0.744m。这产生最小的操纵器长度。将机器人手臂成形为小信封需要折叠。这对于通过人孔进行操纵和制造半径为400mm的弯曲是必要的。穿过人孔的最大高度为180mm;这意味着,对于候选结构,从基地到第
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139371],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

