英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
可变气门正时火花塞点火发动机空气路径控制及规划
摘要 :本文采用的空气路径控制火花点火引擎没有EGR循环,而使采用配有可变气门正时制动器的方法来解决没有EGR循环带来的问题。采用VVT装置的发动机可以自动产生内部废气再循环,对减少燃油消耗(油耗量)和污染物的排放起到了至关重要的影响作用。然而,VVT控制器可以影响进入气缸的新鲜空气量。这会缠上发动机的扭矩输出不足(导致驾驶性能问题)和空气燃油消耗量比率(高)(导致污染高峰)的影响。为了弥补这些不良影响,我们提出了一种新方法。实验结果表明这种方法对于发动机还是很有作用的。
1.简介
1.1目的及意义
目前看来,可变气门正时(VVT)系统均可被用于直喷和涡轮增压发动机。使用这种方法可以减小发动机的尺寸,因此可以减小发动机的油耗(见Lecointe amp;瑞士,2003)。在目前的研究中,只考虑还没有配备废气再循环(EGR)系统的发动机。
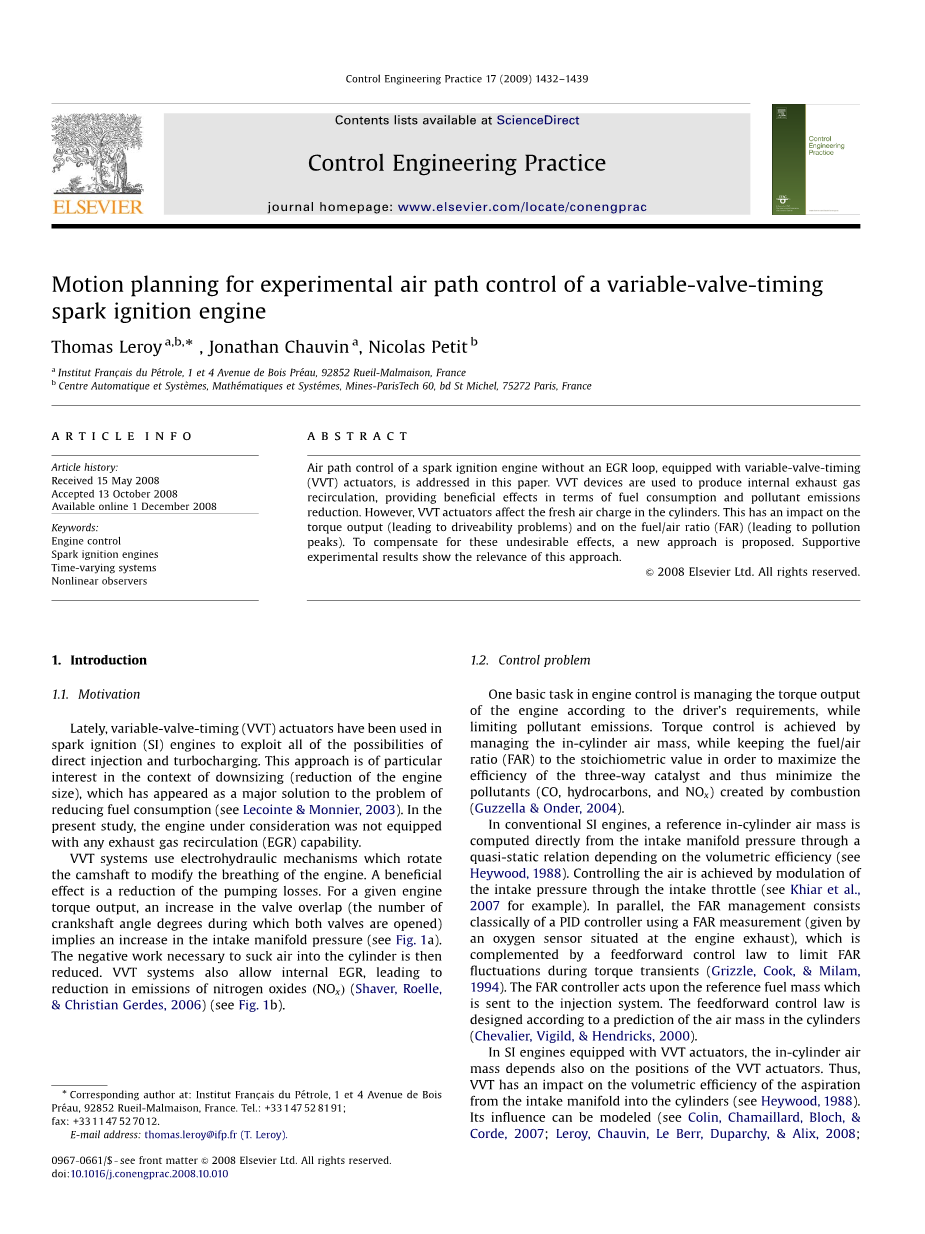
本文使用的系统采用电动液压旋转机制,驱动凸轮轴控制发动机的进气。采用这种做法可以减少发动机的泵气损失。对于一个给定的发动机输出扭矩,增加气门重叠角(进气门和排气门同时打开所对应的凸轮轴角度)意味着增加进气歧管压力(见图1),空气进入气缸所做的负功就会减少。VVT系统还允许使用内部EGR技术,从而减少氮氧化物的排放。(Shaver, Roelle, amp; Christian Gerdes, 2006)(见图1b)。
1.2.控制问题
发动机控制中的一个基本任务就是发动机根据驾驶员的要求管理扭矩输出。扭矩控制是通过控制进入气缸内的空气质量,同时保持空燃比、最大化三效催化转化器的效率从而使化学计量价值最大化。因此可以使燃烧产生的污染物(CO、碳氢化合物和氮氧化物)最少。(Guzzella amp; Onder, 2004)
在传统的SI发动机中,缸内的空气质量是通过进气歧管压力与体积的静态关系计算得到的。控制进气压力是通过调节节气门实现的(例如Khiar et al., 2007)同时,很久以前的经典的管理系统是使用经典的PID控制器进行远程测量(使用一个安装在排气管的氧传感器) ,当转矩波动瞬时变化时由一个前反馈控制的法则限制(Grizzle, Cook, amp; Milam, 1994)。远程控制器是根据燃料质量进行控制并由喷射系统执行。这种前反馈控制是根据气缸内的混合气预测来设计的。
在SI发动机中配备VVT控制器,进入缸内的空气也取决于VVT控制器的位置。因此,VVT对从进气歧管进入气缸的空气体积的效率是有影响的。其影响可以参照(例如Colin, Chamaillard, Bloch, amp;Corde, 2007; Leroy, Chauvin, Le Berr, Duparchy, amp; Alix, 2008; Stefanopoulou, Cook, Grizzle, amp; Freudenberg, 1998),但是误差是无法避免的,这种误差导致缸内的情况预测误差,并且无法避免的通过前反馈系统进入管理系统。这个问题将会产生污染高峰和导致操纵性能下降。
图1 在平均有效压力(5巴)和发动机转速(2000rpm)恒定的情况下测定的进气歧管压力(a)和氮氧化物(b)随气门重叠角变化的情况。
1.3提出控制策略
这里提出了一个简单的替代解决方案。专注于缸内空气质量控制问题,用一种补偿控制策略来改进两种类型的建模误差。进气动力学建模使用一阶系统,使用上述相关VVT控制器的容积效率并且考虑到以下两个误差。其中一个代表实验中决定有效节流面积的查表的误差。另一个代表进气效率规则中的误差。这些误差一个可以通过运动设计和轨迹跟踪获得一维驱动动力学模型的方式解决。从更现实的角度来看,这两个补偿误差可以通过使用一个积分项和一个传感器的方式解决。实验结果可以证明这种方法的可行性。
本文的结构如下。在第二节中给出了进气歧管的参考模型,这个模型由质量平衡和aspirated-flow 方程组成。在这一节中也给出了控制问题,在第三节中列出了控制策略。第一部分认为由设定扭矩的进气歧管压力来生成运动轨迹,然后提出了前反馈和后反馈控制方法。在第四节中,测试平台显示了试验结果。
2.控制问题和系统建模
2.1.空气路径建模
在众多的参考文献中(例如Chevalier,Mu uml; ller, amp; Hendricks, 2000),提出了一个有效和可靠的用表示发动机动力的方式来进行发动机建模的方法。因为复杂的模型可能会影响系统的设计,所以提出了一个简化的进气歧管模型。
2.1.1.进气歧管的平衡
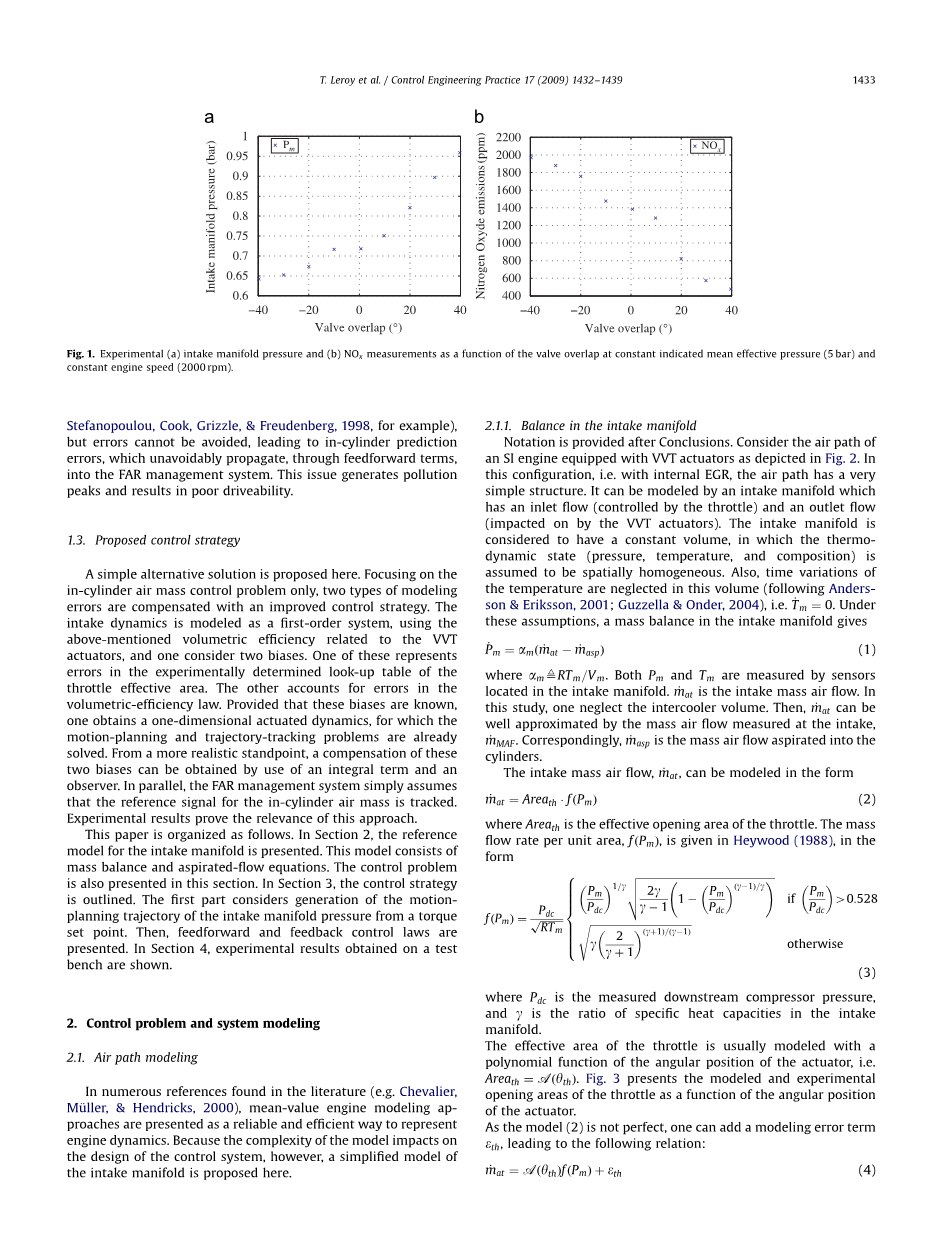
符号代表的含义见总结。一个配备VVT执行器的SI引擎所考虑的空气路径如图2所示。在这个配置中,空气路径有一个包含内部EGR的简单结构。它可以通过进气歧管的进气流动(由节流阀控制)和一个由VVT控制器影响的出口流动建模。进气歧管是一个恒定体积的空间,在热力学状态(压力、温度和体积)下是与空间同性的。在这一部分随时间变化的温度也忽略的(根据Andersson amp; Eriksson, 2001; Guzzella amp; Onder, 2004),即.在这些假设下,进气歧管的质量平衡就确定了.而 都是通过安装在进气歧管中的传感器来测量的。是节气门空气流量。在这项研究中,忽略了中冷器的体积。然后,可以近似成进气过程中测量的进入气缸的空气质量流量。相应的,是进入气缸的混合气质量流量。其中是节气门的有效开口面积,单位面积的质量流速是,由海伍德(1988)给出的公式求得:
是压缩下止点的压力,是进气歧管的比热容。
节气门的有效面积通常是一个多项式建模的控制器角位置的函数,即,图3给出了实验节气门的打开角度作为控制器角位置的函数和模型。但是模型(2)并不完美,可以添加一个建模误差项,由此可以得到以下的关系
根据海伍德(1988)提出的进气门气流质量的建模公式(5)是容积效率,在固定进气正时的发动机中,可以通过进气歧管压力和发动机转速查表得到。而在vvt发动机中,这个关系就不能再被使用了。因为vvt控制器可以很大程度的影响缸内空气的质量。通过vvt控制器的位置确定空气质量的模型已经被Leroy, Chauvin, Le Berr et al提出来了。
这个模型的进气混合器采用几何发动机参数,这个公式是
(6)
是通过歧管压力和发动机转速来查表得到的。的定义是进气门关闭后的缸内容积(vvt的进气函数),的定义是排气门关闭时的缸内容积(vvt的排气函数),并定义了气门重叠角(vvt)的函数,然后使用(6),就可以推导得到一个容积效率的模型
图2。空气路径方案。
进气质量空气();压缩下止点压力();进气歧管压力和温度()和燃空比()由传感器测量;是通过节气门的质量空气流量;是未知的吸气气流流量;、是控制器的角位置。
图3节气门开口区域的模型误差
图4 模型和实验容积效率的比较
图4显示了在一个较大范围(750转到3000转、进气歧管压力从0.3到2巴、所有的vvt控制器位置)内实验和建模的体积效率的比较,使得和,考虑到模型的不确定性,可以添加一个变量来补偿建模的错误,然后(5)变成了(7)当变量完全未知时代表了体积效率的建模误差,而根据Andersson、Eriksson (2001)、Stotsky和Kolmanovsky (2002)的想法,假设一个恒定的偏差,即
2.1.2空间状态模型
使用和可以分别定义系统的控制变量。测量公式是和,将(1)(4)(7)写在一起
2.2控制问题
我们的目标是控制吸进气缸的空气质量。三个执行机构对着变量有影响:节气门、进气VVT执行器、排气VVT执行器(见图2)
有些人认为VVT系统对提高燃烧效率毫无帮助。同时,内部EGR分析表明,它会导致一些进气歧管的进气缓慢,这可能会导致发动机的性能变得不可接受(Stefanopoulou amp; Kolmanovsky,1999)。许多作者提出了使用瞬态控制策略来弥补VVT系统的副作用。Stefanopoulou amp; Kolmanovsky(1997) 从另一个角度考虑,提出了一个基于节流位置和发动机转速的动态凸轮轴调整方案以获得类似固定气门正时引擎的转矩响应。在Jankovic, Frischmuth,Stefanopoulou, and Cook (1998) and Jankovic (2002),看来VVT系统可以干扰到缸内空气质量的控制。这种干扰已经被带入到节气门控制策略中了。
在本文的研究中,考虑VVT变化后通过节气门进行空气质量的控制被认为是衡量干扰。由于节气门允许一方面控制进气歧管压力,一方面可以将任何混合气点设置成一个进气压力点,为了达到这个目的,让变成一个联系到进气混合气的的函数(由).进气歧管压力在公式中。此外也可以通过整合进气混合气质量的方法计算,在一个周期内(是气缸数),考虑到(7)稳态关系,可以由平均公式定义.
3.空气路径控制
3.1运动计划
从到,在汽车应用中,司机需要通过油门踏板控制系统得到所需要的扭矩,这些信息直接转换成一组吸入气缸的混合气的设定点,通过查在稳态条件下实验平台上测定的数值确定。根据查得。
本文提出了一种基于运动计划的方法达到这一想要的设置点,可以通过瞬态空气中的路径计算一个可行的混合气运动轨迹。反推的平均公式(9)是不够的,因为函数是双射的。图5显示了在给定vvt发动机转速和位置的执行机构条件下一对一的关系。
反推后的平均公式是:
图5在恒定发动机转速(2000rpm)和恒定VVT控制器位置()条件下,和一对一的关系。
空气路径有一个一阶动态变量,因此,进气气团轨迹至少可以微分一次。在实践中,最小的低通滤波平滑度的要求是保证扭矩的设定值而是一个连续函数,具有和相同的连续性和可微分属性。然而,偏量是未知的,所以轨迹不能被精确计算出来,为了弥补缺乏的信息,研究员为了能计算压力参考轨迹需要重建。
3.2空气路径测定:从
为了弥补这个缺失的信息,研究员(定义在(11))来提供一个估计的.基于压力测量的非线性观测器可认为由下式得到
是正常数,我们可能会注意到(11)是(8)添加跟踪功能的一个副本和输出测量的输入,未知的部分由输出测量值代替。Leroy, Chauvin, and Petit (2008)证明了观察的收敛,才引出了下面的命题
命题1观测系统状态的收敛指数
研究者提供了一个实时观测数据,||这样错误的收敛指数为0。可以参考压力的轨迹
因此,正如是连续的,命题1意味着||||的可收敛指数为0.
3.3空气路径反馈:从
系统(8)是完全驱动和可逆的。提供了等同于0的一个偏量,可以很容易的计算出对于任何平滑轨迹的开环控制策略。在理论上,(8)的稳定开环是足以保证跟踪的。考虑到开环控制律:
Leroy, Chauvin, and Petit (2008)证明了跟踪轨迹的使用控制律(13),并且引出了以下的问题。
命题2,考虑到一个在=0前提下完美的系统(8)和一些光滑的参考轨迹。开环控制律(13)(使用的估计价值)保证跟踪误差的指数趋向无穷。
3.4空气路径控制:从到
在一个更现实的设置中,假设偏差不能等于零。为了弥补这个缺失的信息,增加了一个积分项反馈法则。旨在跟踪参考轨迹。这导致了我们要考虑下面的控制律。
都是标准的正常数。Leroy,Chauvin, and Petit (2008)使用控制法则证明了追踪的轨迹是正确的。并且引出了以下的命题。
命题3.考虑系统(8)和一些光滑的参考轨迹,闭环的控制法则能保证当t趋近于无穷时跟踪误差收敛到0
3.5空气路径的控制
开环的空气路径控制由进气歧管的压力控制器(见3.3节),闭环控制器(见3.4节),和一个缸内空气质量传感器(见3.2节)。从命题1和3,得到下面的定理
定理1.考虑到缸内空气质量传感器(11)和进气歧管压力闭环控制策略(14)。然后缸内空气质量逐渐趋近于设定值,即当t趋近于无穷时,||||趋近于0.
备注1、当进气空气质量的测量值不可用时,传感器(11)可以不在使用。因此,控制策略(14)仍然有效。对于还收敛,但是参考压力对于不再收敛。这强调了一个好的开环模型中缸内空气质量的重要性。
4.实验结果
4.1实现
整体控制方案总结如图6:控制策略是双重的:空气路径的控制和喷射控制。
空气路径控制使用第三节中的运动规划控制策略。传感器(11)提供了轨迹估算块的压力。获得参考轨迹的压力然后使用动态模型反推确定前反馈控制法则。最后,3,4节中给出了节气门开度设定值。
喷油嘴控制器使用时基于缸内控空气质量轨迹的前反馈控制法则,反馈信息由基于排气测量的PID控制器给出。到喷射延迟和计算时间((see Chevalier, Vigild et al., 2000),对于空气路径控制来说设置一个延迟是有好处的。
图6控制方案
4.2发动机设置
考虑到发动机是一款1.8升四缸并且采用缸内直喷技术和均质燃烧技术的SI发动。空气路径由一个涡轮增压器排气泄压阀,一个
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[153376],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

