英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
水下高清视频和数字光纤设计传输系统
Kaicheng Li1, a, Haibin Yu1, b
1College of Electronics amp; Information, Hangzhou Dianzi University,
Hangzhou, Zhejiang Province 310018, China
aemail: lizhengfsm@qq.com, bemail:shoreyhb@hdu.edu.cn
摘要:目前,由于土地资源短缺,资源开发技术在世界各国竞争日益激烈。我国近年来也致力于开发利用海洋资源。 在深海工作时,水下探测设备需要收集和传输视频和数据。 目前国内海底勘探设备普遍采用分辨率约720times;576的标清分辨率成像系统[1]。 由于视频质量不佳,科学家可能会错过重要信号和主要发现。使用水下高清视频和数字光纤传输系统后,视频分辨率提高到1080p。新的传输系统可以为科学家的研究提供和保存更清晰和更好质量的水下视频。
关键词:水下高清视频; 光纤传输
简介
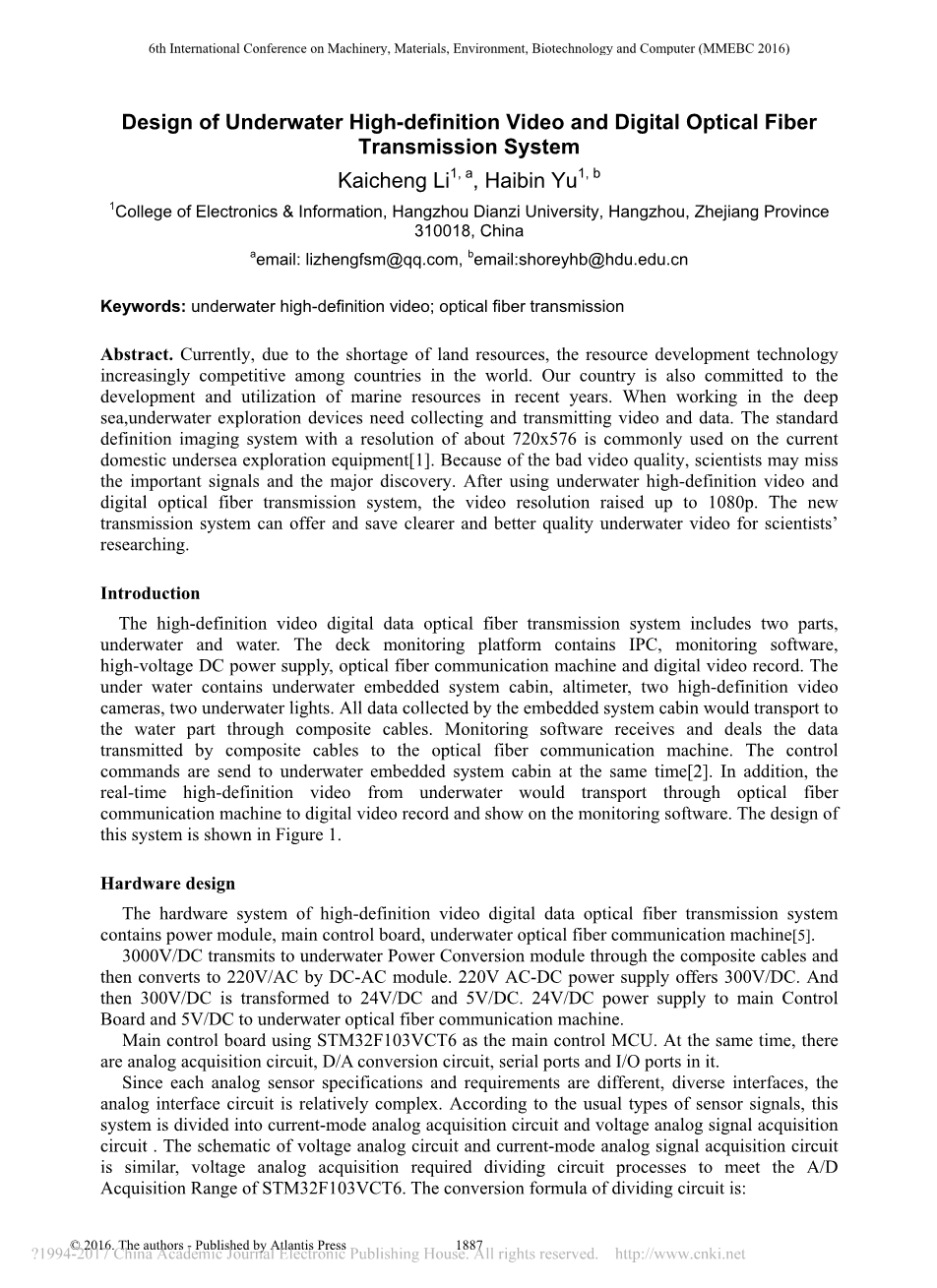
高清视频数字光纤传输系统包括水下和水两部分。甲板监控平台包含工控机、监控软件、高压直流电源、光纤通信机和数字视频记录。水下装有嵌入式系统舱、高度计、两台高清摄像机、两个水底灯。由嵌入式系统客舱收集的所有数据将通过复合电缆传输到水部分。监测软件接收并处理复合光缆传输到光纤通信机上的数据。控制命令同时发送到水下嵌入式系统舱[ 2 ]。此外,水下实时高清视频将通过光纤通信机传输到数字视频记录,并在监控软件上显示出来。该系统的设计如图1所示。
硬件设计
高清视频数字数据光纤传输系统的硬件系统包含电源模块,主控板,水下光纤通信机[5]。
3000V/DC通过复合电缆传输到水下电源转换模块,然后通过DC-AC模块转换为220V/AC。220V交流-直流电源提供300V/DC。然后将300V/DC转换为24V/DC和5V/DC。24V/DC电源供给主控板和5V/DC至水下光纤通讯机。
主控板采用STM32F103VCT6为主控MCU。同时,还有模拟采集电路,D/A转换电路,串行端口和I/O端口。
由于每个模拟传感器的规格和要求都有所不同,接口不同,模拟接口电路比较复杂。根据传统信号通常的类型,该系统分为电流模式采集电路和电压模拟信号采集电路。电压模拟电路和电流模式模拟信号采集电路的原理图相似,电压模拟采集需要分频电路,满足STM32F103VCT6的A/D采集范围。分频电路的转换公式如下(公式1):
图1
(1)
传感器输出电压为Un,R1/R2比例是1/11。Ui是输入电压微控制器引脚。当前模拟信号采集电路接收4-20mA的电流信号,然后将电流转换成电压。转换后的电压也需要满足A/D采集范围。转换公式如下(公式2):
(2)
选择正确的电阻R使Ui的最大值小于A/D采集范围。
为了满足高分辨率摄像机的照明要求,D/A转换电路将0到4095范围内的数字输入转换为0〜5V输出的模拟电压,以控制水底灯的亮度。
用于通过光纤通信机与IPC监控软件进行通信的主串口。另外,另一个用来接收高度计数据,以反映欺骗底部的高度。
在这个系统中,主控MCU负责控制I/O端口,摄像机,灯,高度计等水下设备的开关。一般TTL电压不能直接使用,只能在移位后才能驱动外设。因此,主板微处理器端口输出电压需要转换以驱动继电器和其他设备。另外,有时很多外围设备的开启和关闭都会产生强大的电磁干扰,如电机,大功率交流接触器,如果界面处理可能会导致故障,甚至不会在继电器损坏的情况下,在接口中增加隔离技术切换操作。在这个系统,使用ULN2803转换TTL电压。ULN2803设计兼容标准TTL系列。UL2803的输入端口连接到微控制器STM32F103VCT6的出端口并将输出端口连接到继电器驱动电路的输入端口。根据不同的输入TTL电压信号,ULN2803中的达林顿管将进入饱和或截止状态,控制电流是否流入输出端口。当电流流过输出端口时,电流将由单个达林顿管放大,然后通过继电器线圈,电磁感应磁场使继电器导通。
MCU I/O端口输出不能直接用于这些水下设备。因此,I/O端口需要驱动电路才能使设备打开或关闭。另外,为了避免意外水下设备的作用或损坏,驱动电路也需要保护光学耦合器。
由于SDI的高清晰度,实时传输等优点[3],最初适用于专业视频广播领域,近年来越来越多地被用于安全领域。适用于水下勘探设备取得长足进步。使用EPM570T144I5N CPLD光纤通信机将转换成高速串行数据后,将未压缩高分辨率视频数据发送到光纤收发模块,然后光纤收发模块将高速串行数据转换为光信号。由于高速串行信号的速率可以达到几Gbps,光纤收发模块可以满足相应的速率要求。光纤通信机采用SFP(小型可插拔)光收发模块。我们应该根据火箭I/O收发器的高速串口的输出数据速率选择具有相应速率级别的光模块,对高分辨率视频数据和FPGA接收和处理的串行数据进行转换。SFP-3G-1590光模块用于传输高清视频。
软件设计
软件设计的组成包括PC监控软件和主控软件。 PC监控程序使用Visual C#语言编写,主要的微控制器程序使用嵌入式C语言编写。
监控软件的主要功能是控制水下设备,正确,直观,生动地显示水下传感器的数据,显示水下设备工作状态的系统并实时传输,并通过数字视频记录存储海底高清晰度视频,这有助于甲板视觉操作,并留下视频数据供以后的科学研究。
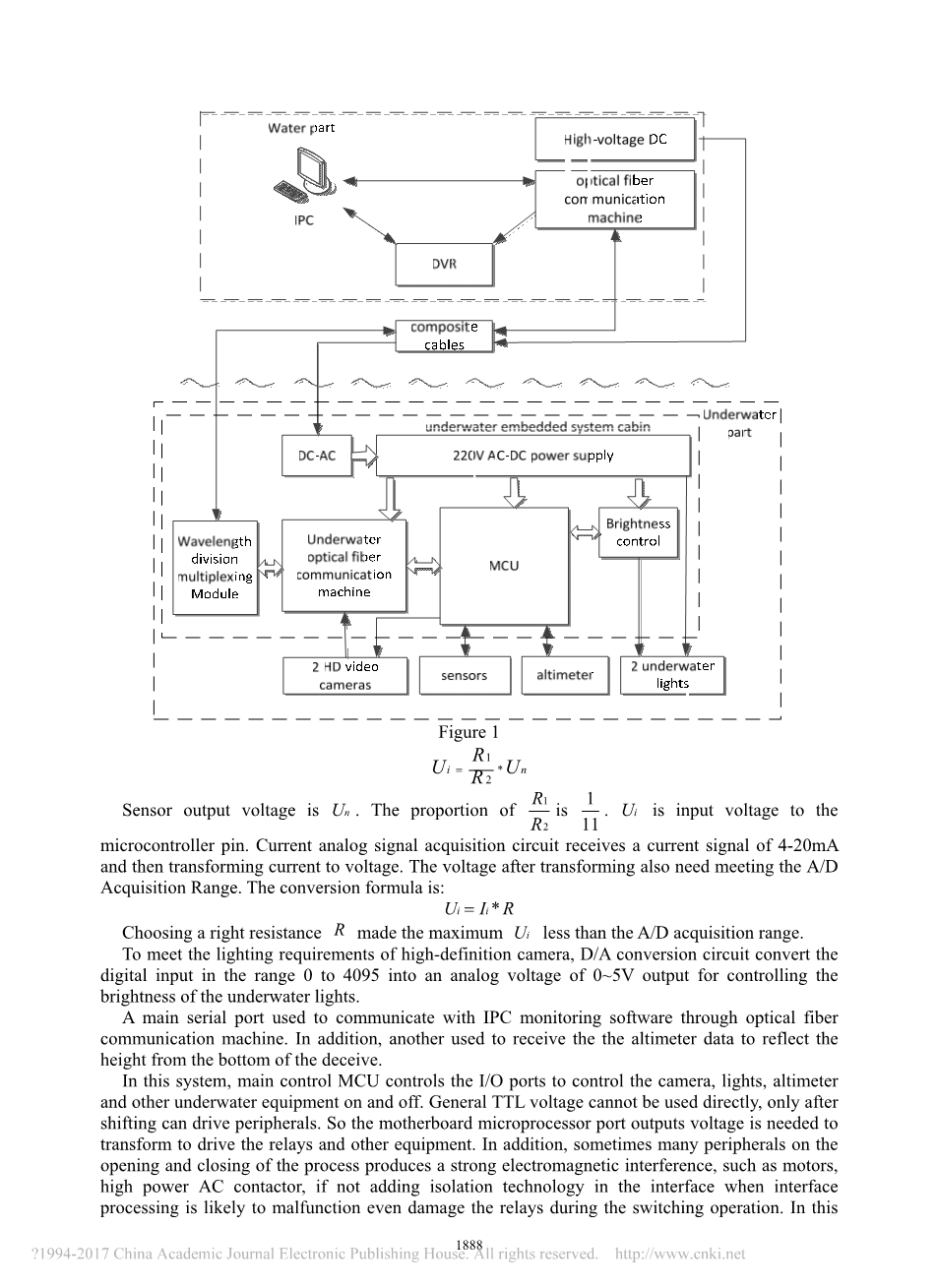
监控软件的工作流程如图2所示。首先,启动软件界面和UI更新线程,配置主通信串口和电表的串口,是否打开视频监控字幕叠加。打开通讯串口和功率计串口后,处理反馈数据,处理水下设备的错误。获取水下传感器的数据和设备工作状态信息,并通过UI线程正确,及时地更新监控软件上的这些信息。我们也将这些信息保存在数据库中。如果叠加字幕,则将重点位置信息(纬度,经度,底部高度,速度)叠加在视频监控上,视频监控将保留,以保证数据和位置的准确性,方便后续的科学分析。
使用嵌入式C语言编写的主要微控制器程序。通过调用ST公司的标准库可以大大减少开发工作。这是STM32编程的基本步骤。主控软件的主要功能是通过接收监控软件的指令,收集水下传感器的数据和水下设备的工作状态以及对水下设备电磁阀的控制。
图2
对于微处理器的正常运行,主控软件必须是系统初始化,包括时钟,串口,CAN总线和ADC转换器模块的初始化。 微处理器为了完成设备功能,我们不仅需要必要的硬件(最低硬件系统)提供依据,并要求相应的软件设计提供支持。 一般来说,系统初始化主要由以下组成部分组成:
1)时钟初始化。程序时钟设置为72M,选择STM32的默认时钟。
2)定时器初始化。该模块主要包括时钟设置,模式选择和定时器的初始值。
3)CAN总线初始化。主要完成CAN总线,滤波器,CAN模块初始化和波特率设置的寄存器。
4)串口初始化。完成工作模式和波特率配置。
5)ADC初始化。主要完成ADC的工作模式,数据对齐,通道选择等配置。
6)继电器和数字接口初始化。该继电器和数字接口初始化实际上是单片机的GPIO连接端口的初始化,包括输入和输出方式,端口配置频率
7)中断初始化。包括类别和优先级配置。
8)看门狗初始化。包括其寄存器和时钟配置以及看门狗计数初始值和超载值设置[4]。
从上述可知,该系统将收集和处理大量模拟传感器数据,包括液压传感器,位移传感器和倾斜传感器的数据。使用STM32F103VCT6转换模块内的12位A/D转换输入模拟量到数字量,然后发送到监控软件。ADC转换公式如下(公式3):
(3)
其中Ui为模拟电压输入,Vref为AD采集电路的参考电压,D是由A/D转换电路转换的数字量。D模拟电路的转换将被过滤后发送到监控软件。另外,在ADC中使用DMA控制器处理可能不需要依赖大量的CPU中断,简单的硬件处理可以实现外部设备和内部RAM之间的高速数据传输。并且不消耗CPU资源来完成寄存器和缓冲区之间的实时通信。
有两个D/A转换电路,用于控制为两个高分辨率摄像机提供光源的两个水底灯的亮度。 D/A转换公式如下(公式4):
(4)
X是从0到4096的输入数字量,Vref是参考电压,Vout是输出转换后的模拟电压。通过改变输入X来改变Vout,然后调整光的电压来控制亮度。
该系统使用两个串行端口,一个用于高度计,另一个用于主要通信。主要通信串行数据传输到监控软件通过水下光纤通信机,复合电缆,水光纤通信机。主串口发送数据,每200ms监控一次软件,并使用串行中断接收指令。
我们需要切换I/O来控制外部设备的工作状态。打开将相应的微控制器引脚设置为高电平,使继电器闭合并连接到24V电源,根据需要或关闭水下设备的液压阀,或为高度计和摄像机提供电源。
结论
在本文中,我们完成了基于PLC的高清视频数字数据光纤传输系统的设计。 这种设计解决了目前深海勘探设备视频海底作业的不足之处以及随后的科学研究问题。同时可以实时反馈水下设备的工作状态信息,简化水上人员的估计,实现视觉操作的复杂化。
致谢
本文设计由国家高技术研究发展计划(863计划)(合同号:2011AA090401)主办。
参考文献
[1]Ding Haojie, Liu jingbiao, The Development of High-definition Video Transmitter based on
FPGA, 2012
[2]Ju Ruqiang, Liu jingbiao, The Development of Underwater Video and Data Transmission
System based on Optical Fiber Cable, 2011
[3]Wang Xueke, Li Xingming, Multi-channel HD-SDI HD Video Multiplexing and Transmission
System Design, 2011
[4]Yuan Qingbo, Yu Haibin, The electronic monitoring system based on CAN network of the
deep-sea drill sampling Medium-Deep Core, 2014
[5]Gong Defu, Research of Real-time Video Capture and Remote Transmission System based on
FPGA, 2010
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[27651],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

