
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
导航卫星轨道的长期演变:GPS / GLONASS / GALILEO
C.C. 赵*,R.A.Gick
航空航天公司,P.O. Box 92957,M4-948 洛杉矶,CA 90009-2957,USA
2002年10月19日收到; 2003年1月20日以修订形式收到; 2003年1月25日接受
摘要:
最近实施了一项研究,检查导航卫星系统的处置轨道是否存在偏心演变的长期增长,比如GPS,GLONASS和GALILEO这些导航卫星系统。以前的研究只检查了GPS Block II卫星的轨道稳定性,而本次研究包括非运行中在内的GPS Block I卫星的轨道,因为它们的轨道倾角与GPS Block II的不同,GPS Block II的倾斜角度为63.4°。与之前的研究类似的是,通过分析和数值的研究来了解这些轨道的长期扰动以及稳定性情况。最初接近圆形轨道的,这些类型的轨道可能演变成具有较大偏心率的轨道(150年内多达0.7°)。通过双平均方程的解析可近似表明,原因是由于太阳/月亮和J2长期扰动引起的共振。总共有105个非运行的GLONASS卫星和上级卫星以及10个GPS / Block I卫星被传播了200年。结果显示,40年之后,GLONASS卫星将开始进入运行中的GPS星座。未覆盖的共振效应主要取决于轨道倾角和高度, 由于GALILEO轨道高于GPS轨道的海拔3000公里以上,其共振效应因高度而变得更加明显。本研究中确定了最大限度地减少重要偏心率增长的方法。这些结果将直接影响海拔在19,000至24,000公里的未来导航卫星的安全。对初始倾角的依赖可能有助于GPS III和GA-LILEO系统的设计者选择合适的倾角来减小大偏心率的增长。对于 GPS和GALILEO的最大偏心率增长,目前可以通过选择两个方案来显着降低偏心率,其标称值均是相差几度的倾角。
copy;2004年空间研究委员会,由Elsevier Ltd.出版并保留所有权利。
关键词:空间碎片,导航卫星系统, GPS / GLONASS / GALILEO,轨道偏心
- 简介
之前在航天公司的研究(Chao,1998,2000; Gick和Chao,2001)考虑了GEO和MEO轨道的稳定性。 MEO处置轨道稳定性研究的结果(Chao,2000; Gick和Chao,2001)揭示了GPS处置轨道大偏心增长的有趣现象, 通过双平均方程的解析近似表明,原因是由于太阳/月亮和J2长期扰动引起的共振。 这一发现在空间界引起了相当大的关注,并可能改变未来GPS卫星和上级的处置策略。
本文感兴趣的是GLONASS和GALILEO等其他导航卫星系统的处置轨道是否存在长期偏心增长,这项研究还包括了10个GPS Block I卫星这些停止服务的卫星。 GPS Block I卫星在轨道上有重要倾角(63.4°),与GLONASS卫星相同,大约有105个不可操作的格洛纳斯卫星和上级在其原始轨道上漂移。由于偏心率的增长,包括伽利略未来处置轨道在内的这些轨道可能会与作战导航星座(GPS,GLONASS和GALILEO)的轨道相交,接近LEO和GEO的运行高度,从而增加碰撞的可能性(Jenkin和Gick,2001年)。在本文中,我们重点分析GPS Block I,GLONASS和GALILEO轨道稳定性及其对未来处置轨道政策的影响。期望这项分析将提供有关偏心增长的长期行为的相当深入的见解,并提出处置轨道插入的策略。
本文的研究的目标是:
(1)综合考虑所有的主要扰动力,了解失效的GPS Block I和GLONASS卫星以及GALILEO未来处置的卫星的长期轨道扰动和稳定性; (2)研究该轨道高度区域对未来导航系统的影响;(3)为生命末期卫星/上层卫星提出方法和要求。
这次项目由GPS项目办公室赞助,属于航空航天公司根据美国宇航局于1995年发布的报废处置指南启动的GPS Block II研究的后续研究。
2. 分析调查
轨道参数的长期变化通常可以通过平均方差变化与扰动力相关关系表示,平均方程可以分为单平均或双平均。单平均方程是通过平均轨道周期内的变化方程来导出的,因此消除了所有的短期或轨道周期项,由此产生的变分方程显著缩短,并且可以识别由于特定的力导致的占优势的长期变化。单次平均方程多次在第三个物体的轨道周期上取平均值,进一步缩短变化方程得到的方程被称为双平均方程。
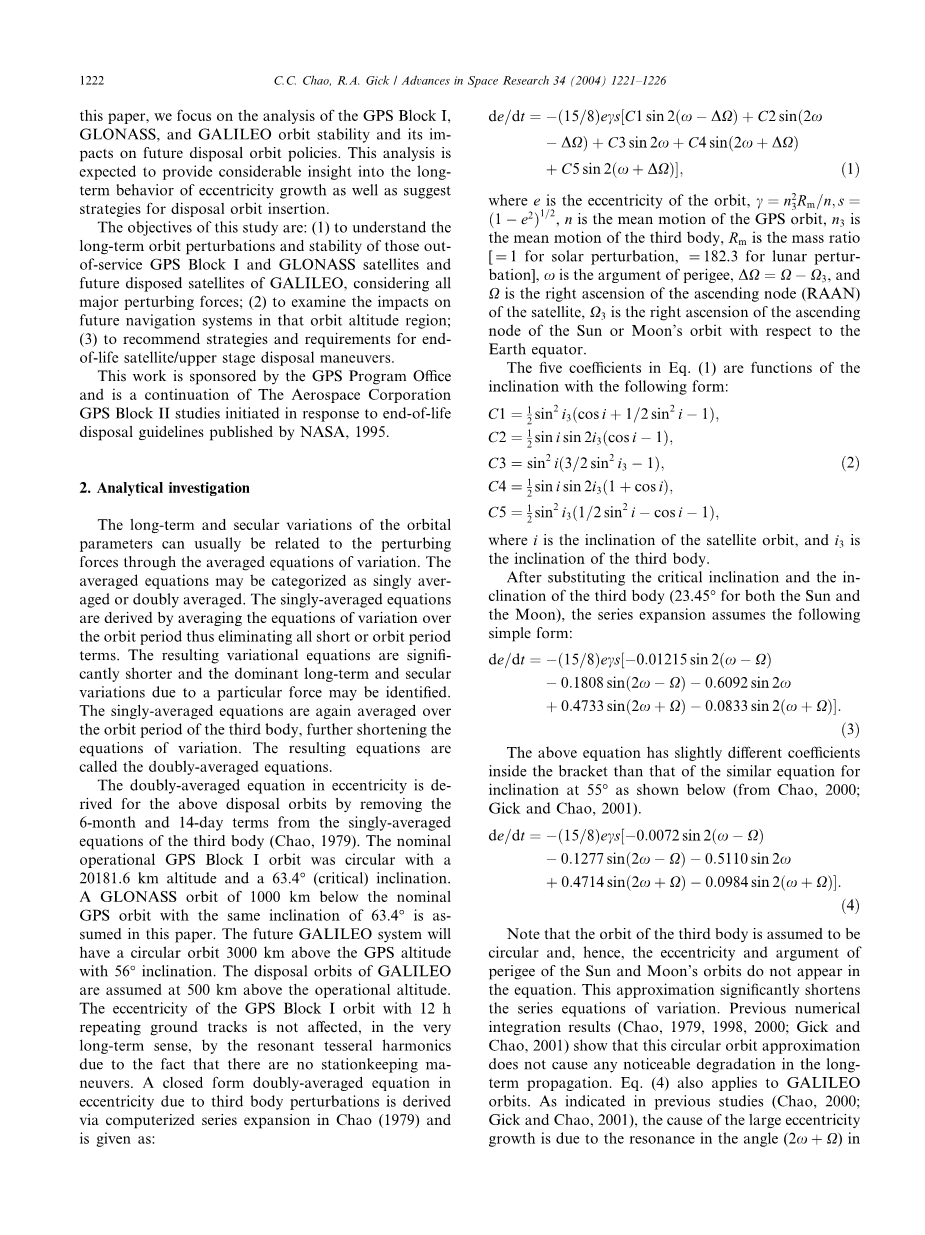
通过从第三机构的单平均方程中去掉6个月和14天的条件(Chao,1979),为上述处置轨道引入了偏心的双平均方程。标称运行GPS Block I轨道为圆形,高度为20181.6公里,倾角为63.4°(临界)。在本文中,我们假定在标称GPS轨道下方1000 km的相同倾角63.4°的GLONASS轨道。未来的伽利略系统将有一个圆形轨道,距离GPS高度3000公里,倾角56°。伽利略的处置轨道假设在操作高度以上500公里处。 GPS Block I轨道与12 h重复地面轨道的偏心距在很长远的意义上并没有受到共振台阶谐波的影响,这是因为没有定位马达。在Chao(1979)中通过计算机化的系列扩展推导出由于第三体扰动引起的偏心率的闭合形式双平均方程,并给出如下:
(1)
其中e是轨道的偏心率,,s=(1-e2)1/2 ,n是GPS轨道的平均运动,n3是第三个物体的平均运动,Rm是质量比[=1代表太阳摄动,=182.3代表月球扰动],是GPS轨道的平均运动,n3是第三个物体的平均运动,代表近地点参数,,且是卫星升交点(RAAN)的赤经,是太阳或月球轨道相对于地球赤道的升交点的赤经。
等式中的五个系数 (1)是具有以下形式的倾斜函数:
,
,
, (2)
,
,
其中i是卫星轨道的倾角,i3是第三个物体的倾角。
在代替第三个物体的临界倾角和倾角(太阳和月亮均为23.45°)之后的该式扩展形式,假设如下简单形式所示: (3)
上述方程式中括号内的微分系数略低于55°倾角下的相似方程为(如Chao,2000; Gick和Chao,2001):
(4)
注意,第三个物体的轨道被假定为圆形,因此,太阳和月球轨道的近地点的偏心率和自变量不会出现在方程中,这种近似显著地缩短了系列变差方程。以前的数值积分结果(Chao,1979,1998,2000; Gick和Chao,2001)表明,这种圆形轨道近似在长期传播中不会引起任何明显的退化。式(4)也适用于伽利略轨道,正如以前的研究(Chao,2000; Gick和Chao,2001)所指出的那样,大偏心率增长的原因是由于上述方程中角度(2ɷ Omega;)的共振。在GPS高度和倾角为55°时,2 ɷ的速率几乎抵消了Omega;的速率。对于GLONASS和GPS Block I轨道,sin 2 ɷ的项诱发共振,或者在d ɷ /dt消失的临界倾角附近。由J2和日月效应引起的ɷ和Omega;的长期的速率可以由平均方程计算(Chao,1979),正如以前的研究(Chao,2000; Gick和Chao,2001)所指出的,在标称的GPS操作高度500公里以上的GPS处理轨道的节点回归率每天约为-0.038°,近地点的近地点参数每天约为0.021°。在方程右边的五个正弦项中,(4)式中,第四项的周期最长,这是由于组合角(2 ɷ-Omega;)的共振效应非常小,每天约为0.0046°。对于GLONASS和GPS Block I的轨道,方程(3)由于临界倾斜效应而引起了共振。其中,表1总结了偏心率方程中主导项的角速率。
表1
J2和日月干扰造成的角速率(deg / day)总结
|
导航系统 |
ɷ |
Omega; |
第2项2 ɷ-Omega; |
第3项2ɷ |
第4项Omega; |
|
GLONASS |
0.0010a |
-0.0368 |
0.0388 |
0.002 |
-0.0348 |
|
GPS Block I |
0.0010a |
-0.0314 |
0.0334 |
0.002 |
-0.0294 |
|
GPS Block II |
0.0212 |
-0.0378 |
0.0802 |
0.0414 |
0.0046 |
|
GALILEO |
0.0132 |
-0.0262 |
0.0526 |
0.0264 |
0.0002 |
强调中确定了具有非常小的角速度的共振项, sin(2 ɷ)表示GLONASS和GPS Block I轨道的长期偏心增长,而sin(2ɷ Ʊ)是导致代表GPS Block II和GALILEO处置轨道类似增长的原因。 上述分析调查清楚地表明,MEO高度区域的其他导航卫星在19000〜24000公里范围内存在由J2和太阳/月球共振引起的共振干扰引起的偏心率演变的显着增长。
- 长期数值传播研究。
本节主要介绍长期偏心率增长的数值分析,使用MEANPROP的长期轨道预测软件工具MEANPROP获得了该结果,该工具使用高精度半解析轨道传播器(由Draper实验室开发的SAOP)并假设以下干扰方案:8* 8 WGS 84地球重力模型,太阳/月球重力吸引力,太阳辐射压力和大气阻力。由于其他行星和地球潮汐造成的扰动很小,因此在本次分析中忽略。 MEANPROP的数值精确度与[TRACE](宇航公司最精确和维护良好的轨道传播/测定工具)在[100年传播(Chao,1998,2000)]中得到了比较,表明使用MEANPROP为期200年的整合。对于GPS应用,当偏心率超过0.02时,预测长期偏心率的估计不确定性很小,仅为几个百分点。这种验证是通过比较有和无太阳辐射压力的结果来确定的,太阳辐射压力被认为是导致200年积分期间不确定性的关键参数。
图1. GPS Block I(非操作)远地点高度历史记录
图2. GPS Block I(非操作性)近地点高度历史记录
图2. GLONASS(非操作性)远地点高度历史
图1和图2显示了10个非运行GPS Block I卫星的远地点和近地点历史。这些轨道的长期偏心增长将导致远地点和近地点分别接近GEO和LEO的运行高度。图3显示了105个非运行的GLONASS卫星的最远点历史。从图3可以清楚地看到,GLONASS卫星将在未来40年内开始穿透GPS运行高度,并将在可预见的未来继续侵入这个空间。
- 依赖倾向
为了制定缓解长期偏心增长的策略,从而提高处理轨道的稳定性,我们研究了偏心率变化对各种轨道参数的敏感性。在一个(足够长的)时间内达到的最大(最坏)偏心率被用来衡量轨道稳定性。换句话说,我们研究了随着时间的推移取得的最大偏心率如何取决于轨道参数的影响,以推导出保持最大偏心率较小的策略。
正如我们在前面的工作中指出的那样,处置轨道设计战略涉及针对受害者的最初争论。 这个策略是通过解析(方程(3)和(4))和数值方法确定每个轨道平面近地点初始变元的最佳窗口。 根据早期的研究(Chao,2000; Gick和Chao,2001),通过恰当地瞄准近地点的初始偏心率和论点,处理后的偏心率在未来200年内将保持非常小。 这种战略需要额外的推进剂和轨道调整机动,这可能是不可取的。
图4. GPS处理轨道与倾角的最大200年偏心率增长
图5. GALILEO处置轨道与倾角的最大200年偏心率增长
第二种推荐的策略是避免潜在的大偏心率增长,将操作轨道的倾角从当前的标称值移动几度,接近52°,如图2和图3所示。对于GPS和GALILEO星座轨道,从50°到70°的倾角进行了大量的200年数值积分, 结果如图1和2所示。图 4和5,揭示了最大(最坏)偏心率增长对轨道斜率的强烈依赖性。 通过选择与目前两个项目的标称值相差几度的操作倾角,GPS和GAL
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[21433],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

