
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
一种基于Flame多特征融合的火灾识别算法
Li Hongliang,Liu Qing,Wang Sunrsquo;an
School of Mechanical Engineering Xirsquo;an Jiaotong University, Xirsquo;an, China ZhuZhou Times ElectronicTechnology Co.,Ltd, ZhuZhou, ChinaEngineering Training Center, Xirsquo;an University of Technology, Xirsquo;an, Chinalihl@teg.cn
摘要:本文在分析火焰燃烧特征的基础上,提出了一种基于多特征融合(MFF)自适应,自学习和容错能力强的火灾识别算法,此算法主要根据火焰的闪烁频率及其动态轮廓的特征实现火灾的识别。具体流程如下,首先,拾取火灾动态视频,提取可疑火区的特征向量,并利用分散FFT对特征向量建立量化区分规则; 然后,检查最近变化的框架,定性和定量分析其变化,使其边缘特征量化;在量化所有特征参数之后,使用概率更新函数来融合这些多特征以实现火灾的概率识别。本文的MFF算法具有自适应,自学习和能够消除运动或静止物体白点的干扰的能力,即使在聚光灯,汽车灯和照明变化的非常复杂的环境下也是能达到很好的识别效果。
关键词:火焰检测; 火灾识别; 概率模型; 多功能融合
1 简介
火焰在火灾识别中起着越来越重要的作用,许多学者对火焰探测做了大量深入的研究,并提出了许多算法。例如,Healey根据火焰颜色实现了火焰识别[1]。Noda和Ueda使用红外图像来检测隧道的火焰,并达到用火焰颜色识别的目的[2]。Yamagishi和Yamaguchi使用基于HSV的色彩空间和人工神经网络来识别火焰[3]但这种方法很容易与白炽灯,路灯或汽车灯混淆,导致误报。 B.Uğur通过对火焰的颜色和运动来识别[4]。Yigithan等人在前人研究的基础上,采用相关特征的不规则边界和小波变换来实现火焰识别[5]。此外,WalterPhillips和Chen-Zhao ,HeWen-Bing Homg , Lv-PuYi,等人也做了一些相关的研究[6] - [9]。以上算法主要集中在火焰颜色和面积的分析上,利用颜色空间阈值提取火焰区域和区域标准,消除周围干扰。虽然算法具有高速,实时的优点,但容易受到干扰,不适合在复杂环境中工作。这些算法没有考虑空间位置和整体特征,因此容易遗漏和错误警报。
一些研究人员还将火焰的形状纳入火焰识别标准。 例如,Liu Chebin等人以火焰轮廓的傅里叶变换系数为模板,识别火焰燃烧过程的傅立叶系数来到达火焰区域识别的目的[10]。虽然该方法的识别率高,但是环境要求苛刻,不适合小功率燃烧或稳定燃烧的情况。Li J 以火焰的一阶矩阵为准则来识别火焰[11],他的结果表明火焰的一阶矩阵不易受外界环境或燃烧材料的影响,其火焰变化率大于非火焰区域,但在复杂的光照条件下,一阶矩阵变化非火焰图像区域的速率也是有着很大的变化,这使得算法很难实现正确的识别。鉴于火灾的发生和发展是非平稳的随机过程,环境问题复杂且不可预测,在不确定火灾过程和环境问题的情况下,任何固定算术都不能完全满足识别需求。因此,本文对火焰的燃烧特性进行了研究,并设计了一种自适应的自学习,具有容错特征的火焰识别算法。它可以消除自身的信号干扰和背景噪声,以适应更复杂的环境,如特定的工作场所或大型的开放空间。
2 火焰特征研究
火是一种动态燃烧过程,具有不稳定性和不断发展性,因此火焰会始终保持闪烁和跳动,其视觉特征主要在火焰图像的边缘上体现。这种现象如边缘抖动,产生尖角和尖角数量的不规则跳动,都会导致整体火焰高度,面积等相应变化,其变化规律直接关系到火焰闪烁频率 据统计分析,在图像中的帧的序列中,所述的火焰图像的能量的70%集中在低频范围内,大约1至8HZ。能量分布可以反映火焰燃烧的特点,本文主要分析火焰的静态和动态特征,如火焰闪烁频率和火焰轮廓。
2.1基于区域的火焰闪烁频率识别
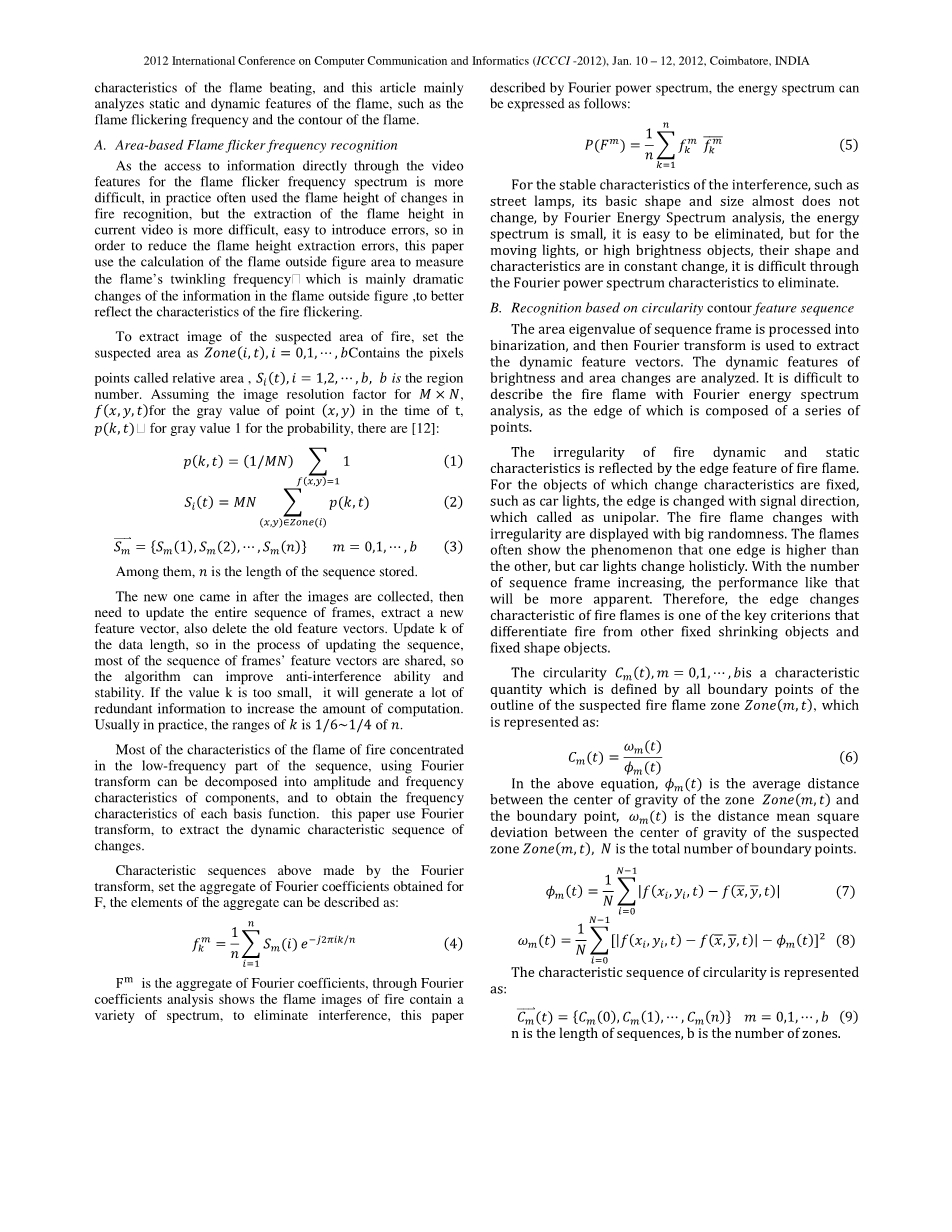
由于直接通过视频获取对于火焰闪烁频谱信息比较困难, 因此,为了减少火焰高度提取误差,本文使用火焰外部图形区域的计算来测量火焰的闪烁频率,这主要是因为火焰外部的剧烈变化,能够更好地反映火灾闪烁的特征。
提取可疑区域的图像,将可疑区域设置为。b称为相对区域的像素点,,b是区号。 假设图像分辨率因子为,为在t时刻的灰度值。当灰度值为1时有:
(1)
(2)
(3)
其中,n是存储序列的长度。
在完成一幅图像的处理之后进入新的图像,需要更新整个帧序列,提取新的特征向量,同时删除旧的特征向量。更新数据长度k,在更新序列的过程中,大部分帧序列的特征向量是共享的,因此该算法有着较强抗干扰能力和稳定性。如果值k太小,则会产生大量冗余信息以增加计算量。 通常在实践中,k的范围是n的1/6~1/4倍。
火焰的大部分特征集中在序列的低频部分,利用傅立叶变换可以将其分解成振幅和频率特性的分量,并获得每个基函数的频率特性。本文采用傅里叶变换,提取动态特征变化序列,通过傅里叶变换进行上述特征序列,设置为获得的傅里叶系数的集合,聚合的元素可以描述为:
(4)
是傅立叶系数的集合,通过傅里叶系数分析火焰图像中含有多种光谱,能够有效消除干扰,本文用傅立叶功率谱描述具体公式4:
(5)
对于静态干扰源如路灯,其基本形状和尺寸几乎不变,通过傅立叶能谱分析,这些干扰源能谱很小,很容易被消除,但对于动态的干扰源如移动的灯还有高亮度物体,它们的形状和特性都在不断变化,很难通过傅立叶功率谱特性来消除。
2.2 基于圆度轮廓特征序列的识别
火焰的动态和静态特性的不规则性反映在火焰的边缘特征上。对于固定了变化特性的物体如汽车灯的边缘是随着特定的信号而改变,然而火焰的变化是不规则的,随机性较大火焰经常表现出边缘高低不平的现象, 随着序列帧数量的增加,这样的表现将更加明显。因此,火焰的边缘变化特征是区分火焰与其他固定收缩物体和固定形状物体的关键标准之一。计算火焰的圆形度的具体公式如公式6所示,其中圆形度是一个特征量,由疑似火焰区的轮廓的所有边界点定义。
(6)
是的重心与边界点之间的平均距离,是可疑的重心之间的距离均方差,是边界点的总数。
(7)
(8)
表示圆形的特征序列如下公式9所示。
(9)
n是序列的长度,b是区域的数量。
火焰图像序列中可疑对象区的圆形序列是随机序列,但是在实际问题中很难得到随机过程中点的分布函数,在许多实验中,通常需要一些特征量的概率分布来描述该过程。本文通过平均函数和方差函数描述可疑火焰区域的边界变化的一致程度,实现了该过程。
随机变量的平均值定义为:
(10)
随机变量的方差表示为,其定义为:
(11)
是平均值,是方差,它反映了对象边缘变化的离散程度,边缘离散度越大,越符合火焰变化的特性。因此在实际应用中,根据特殊干扰和样本,首先计算可疑火焰离散值的范围,然后计算离散度方差,以确定它是否是火焰。
3 火焰识别的概率模型
对与火焰燃烧特征的研究表明,火焰的闪烁频率,动态轮廓,颜色和强度在火灾识别中起着重要作用,但这些特征中的只识别单一特征是行不通的。为了保证火焰识别算法的可靠性和准确性,本文采用的是多特征融合算法。上面的每一个特征对整体概率识别都很重要,但任何一个都不能确定最终结果,只有满足组合特征的图像才是火焰识别的最终标准。为了获得测量火灾区域的标准,采用可疑概率测量结合动态和静态火焰特征,我们设计了一种基于多特征融合的火灾识别算法概率模型。
该算法具体原理如下:是强度,是序列,是区域变化的概率特征,是圆形,经过组合和分析,基于火灾识别算法的概率模型多特征融合计算如公式12与公式13所示:
(12)
(13)
其中t是时间,是权重系数,范围从0到1的。是视频中火焰区域概率的更新结果,用于更新可疑火焰区域的概率,范围是0到99,当没有新的可疑火焰区域匹配时,可疑区域的概率将减少,直到概率之和变为零。
的取值范围如下:
alt;=lt;=b,a和b确定可疑概率的更新速度,随着a和b的值变大,可疑火焰区域更新的概率更快,因此a和b控制概率模型的更新速度越快。概系统响应时间越短,会影响火焰识别算法的稳定性和准确性,因此a和b的值应在在-2到2之间;
是单边增加函数,带入,,,中可得,当gt;时,gt;此特性适用于其所有情况,该结果表明当任何可疑的火焰区域特征增强时,概率的更新顺序将更高。
是在多特征融合的情况下,当lt;,lt;,得到lt;,其他任意两个特征组合都会得到相同的结果,但对于单个特征上述结果无法实现。
为了保证火焰识别算法的可靠性和准确性,本文采用多特征融合算法识别火焰,每个火焰特征在整体概率中起着重要作用,但没有任何一个单一特征可以确定最终火焰识别的结果。
4 检测结果
为了验证本文算法对移动物体的白斑去除能力,我们进行了如下实验:选择木材作为燃烧材料,选择直径200mmtimes;200mm的方形油底壳作为火源,选择穿着白色衣服的行走者作为干扰源。 具体实验结果如下:图1b中的结果表明,当人体移动的图像被提取出来时,尽管人的身体一次在移动,但是形状都会以相同的方式改变,不具有明显的火焰跳跃的特征。 因此我们可以确保对于移动物体的干扰,概率密度不会一直在增加,相反,它会随着时间的推移而减少。从图1d中我们可以看出,运动物体作为火灾的识别概率远小于75%,因此该算法可以排除运动物体引起的干扰,这意味着运动物体干扰白点对系统的影响微不足道。
为了验证该算法的静态白点去除能力,我们在选择燃料作为燃烧材料时需要考虑它的外壳形状,该实验的干涉源为固定频率的指示灯的光斑。具体实验结果如图2所示,静态白点干扰和火灾产生的白色火焰之间的显着区别,因为白点干扰以固定频率离散地出现,我们可以通过尺寸和火焰闪烁频率来区分它们。假设火焰闪烁频率与灯光闪烁的频率正好相同,从图3中可以看出,我们可以看到静电干扰中白点的形状没有变化,除了小区域的干扰外,圆形的形状没有显着变化,相反,在火焰的圆度上存在显着的形状变化,在火焰的边缘处具有明显的重新调节,这导致比常规物体更大的圆度值。 总之,通过本文算法,可以很容易地消除白色静电干扰。
图1a 火场动态白点干扰照片 图1b 可疑的火灾区域标记
图1c 火场的静态白点干扰 图1d 火焰识别的结果
图2a火场的静态白点干扰 图2b 采用MFF算法进行火焰识别
图3a 白点干涉圆度测试 图 3b火焰区的圆度测试
为了验证本文算法的性能,将具有干扰信息的5组火焰视频用作测试数据,实验数据的5组视频具体如下:
- 视频1:在室内仓库环境中,干扰信息来自卤素灯和白炽灯,图像分辨率为400times;300,燃烧材料为500mmtimes;300mm的纸箱。
- 视频2:夜间外路,主要干扰信息来自路灯,图像分辨率为400times;300,燃烧材料为汽油,油底壳为方形油底壳,尺寸为200mmtimes;200毫米。
- 视频3:夜间在外面的道路上,干扰信息形成机动车灯,图像分辨率为400times;300,燃烧材料为聚氨酯,油盘为方形油底壳 200mmtimes;200mm。
- 视频4:夜间仓库环境中,干扰信息为静止闪烁设备指示灯,图像分辨率为400times;300,燃烧材料为柴油,油底壳为方形油锅尺寸为200mmtimes;200mm。
- 视频5:在夜间仓库环境中,干扰信息来自穿着白色衣服的移动身体,图像分辨率为400times;300,燃烧材料为棉花,棉花放置在方形油底壳中,尺寸为200mmtimes;200mm。
火焰响应时间是从火灾开始到发出警报的识别系统所需的时间。在本文中,使用可疑概率的方法来显示火灾等级,并且火灾识别概率被设置为超过75%以发出火灾报警,因此“确认报警时间”是从火焰出现到识别火焰概率为75%时所需的时间。火焰识别率是当系统识别实验进行N次时,有m次算术的可疑概率高达75%,识别率为m / N,火焰的误报率为当系统识别实验进行N次时,有r次算术识别火焰作为干扰信息,可疑概率高达75%,然后误报率为r / N。该实验的实验环境为P4处理器,2.5GHz主频和2G内存计算机平台,以及VC 6的软件环境。
本文使用的比较算法如下:Ling的背景差分法和弧对火焰提取算法,命名为算法a [13]; Kandil等人基于神经网络的火焰提取算法,命名为算法b [14] ,Byoung等人使用图像序列,结合帧间差异,并利用小波算法分析火焰的动态特性,并利用矢量机和亮度分布进行识别,命名为算法c [15]<!--
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[17852],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

