
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
智能床传感器系统:设计,实验和结果
Anuroop Gaddam,S.C. Mukhopadhyay,Gourab Sen Gupta
工程与先进技术学院,
梅西大学,北帕默斯顿,新西兰
电子邮件:s.c.mukhopadhyay@massey.ac.nz,G.SenGupta@massey.ac.nz,
摘要:本文介绍了一种智能床传感器的设计,它是大型智能家居监控系统的一部分。 传感器的子系统不仅能检测到床上的人的存在,还可以精确地指示人在床上的位置。 初始测试(初次试验)的结果是有望成功的,并且设想传感器系统将被扩展以检测睡眠模式中的异常,例如睡眠唤醒周期,躁动等。系统以安置在四个床柱的压力传感器为基础构建。本文记载了在平台上使用25磅传感器的初次负载测试结果,并且可以利用外部陷阱技术来计算载荷在工作台上的精确位置。
关键词 - 床传感器,智能系统,智能家居,监控
一、引言
中老人口的比例的上升造成对老年护理需求的增加。在新西兰,人的平均年龄预计将会从2010年的36.6岁增长至2015年的43.1岁。这将对国家资源造成巨大压力,用于老年人护理的费用将会增加。越来越多的老年人选择独自生活而不是养老院或者老人之家,然而这些人往往体弱多病,需要全天候的监测以便在必要的时候提供即时医疗帮助。相当多的研究工作使用无线个人局域网络用于人们的家庭监控。
随着传感技术的不断发展,它在改善老年人及其家庭的生活质量方便发挥着重要作用。基于无线传感器的家庭监控系统,特别是针对老年人的家庭监控系统已开发,并且已经开发出原型系统,该系统已详细描述。当前系统以传感器为基础以检测家用设备的使用情况。人们逐渐意识到有将床的传感器并入电流监测系统以增强其效用和有效性的必要。
先前已有将传感器附接于床垫之中以此定位人在床上的具体位置。压敏传感器安装在床垫的顶部并横跨床垫的宽度,中央压敏开关现实病人位于床中央,当患者朝床的任何一边移动时,边缘开关被激活。该边缘开关产生预警信号,该预警信号指示看护人员患者已从床中央移动至边缘并可能正试图单独离开床。这个预警信号为看护人员提供了在患者实际离开床之前到达患者处。该系统防止容易眩晕或迷失方向的病人在无人看护的情况下离开床而引起的跌倒。然而,这种带有传感器的床垫昂贵又不舒适,1993年,Gusakov提议使用床位置监测器,它是一种监测患者相对于床的位置的装置。该体统可以监测患者是正试图从床上坐起或者是离开床。但该装置使用流体和压敏开关,这使得安装变得繁琐。
本文介绍的低成本床传感器子系统的主要目的是监测一个人的睡眠模式,当他独自住在房子里,异常情况出现时或者紧急情况下需要即时医疗救助时。这种智能传感器有收集和处理各类信息的功能,包括数据解释和数据融合。虽然几个传感器是现成的,但是使其在特定的应用程序(如老年人的监测)中变得“智能”依旧是一个具有挑战性的任务。智能床传感器不仅能检测床的使用模式,也具有整理数据和标记异常的能力。
在三种情况下,床的传感器是有用的的:一个人睡眠时间超过他通常的睡眠时间,一个人在他通常睡觉的时间时没有躺在床上以及一个人虽然躺在床上,但是辗转反侧,这表明该人可能不适或深受医疗问题困扰。
在第二部分,我们给出系统概述,在第三部分,我们详细介绍了硬件。在第四部分呈现了系统的试验结果,而在文章的第五部分对未来工作的总结和摘要。
二、系统概述
本文所提出的床传感器子系统的功能框图如图1所示。该系统由四个传感器单元组成,每个床传感器的输出被放大并通过信号调节电路以减少信号中的噪音。模拟传感器输出馈送到微控制器(Silabs C8051F020 [7])的ADC通道。ADC具有12位分辨率和8通道多路复用单端输入,其中使用到四个。每个传感器的重量显示在LCD模块上。微控制器连接到RF(射频)发射机(Radiomatrix 433 MHz),数据传输到中央监控站,在那里推理引擎在PC上运行。
图1:无线床传感器系统的功能框图
三、硬件介绍
本部分将详细介绍硬件子系统。
- 压力传感器
床监控系统使用Tekscan的FlexiForce传感器[8]。如图2所示,FlexiForce传感器使用基于压阻的技术。将外力施加到传感器的“主动感测区域”导致感测元件的电阻的变化,该变化与施加在传感器上的力成反比。 传感器特性如图3所示。选择该传感器是因为它超薄(0.008“,灵活,性价比高,易于集成。
图2:Flexiforcereg; 监测床所用的传感器
这些传感器的基底由两层聚酯膜构成。每一层聚酯膜上使用银用于电接触。然后是压敏油墨层,在使用粘合剂将两层基底层压在一起以形成传感器。压敏油墨层的顶部有一银圈为“主动感测区域”。银从感测区延伸至位于传感器另一端的连接器形成导电引线。FlexiForce传感器基于策略(策略性)地放置在床下,以确定是否有力施加于床上(确认是否有人躺在床上)。电压的输出随着所施加的力变坏而呈现线性变化。压力传感器可测量高达444N的力(100lbs)。为了区分无生命体和人类,我们需要校准传感器单元以使每个末端所施加的力都可以产生有效的电压输出。压力传感器基本用作检测力的装置,如当某人躺在床上时,将通过建立力-电压电路来实现测量。此外,传感器需要调节。一旦完成后,传感器的输出可重复稳定在2.5%内。
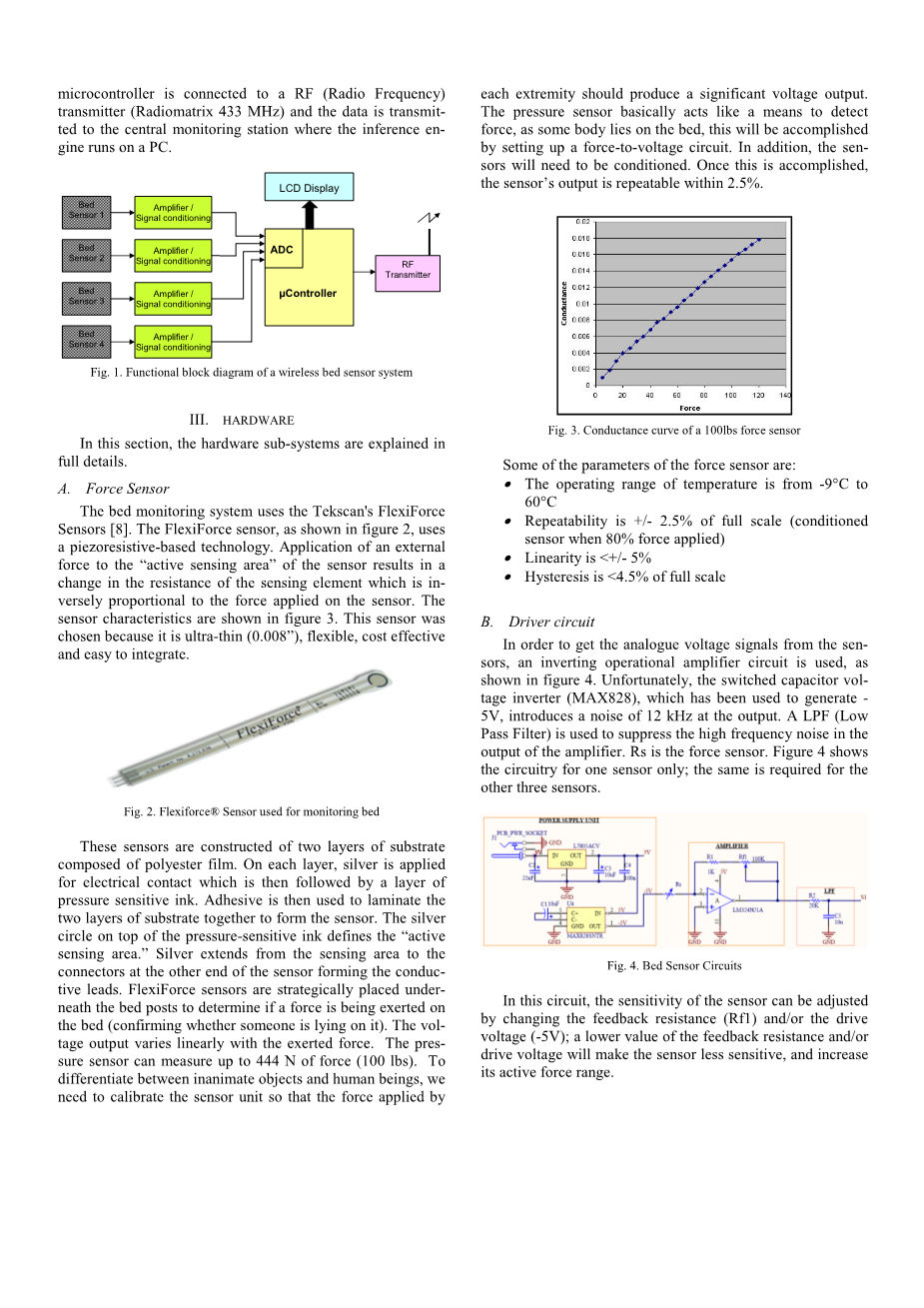
图3:施加100磅力时传感器的电导图
力传感器的一些参数是:
可操作的温度范围是 -9°C到 60°C
重复性为满量程的 /- 2.5%(传感器已调节好并施加80%的力时)
bull;线性度小于 /- 5%
bull;迟滞lt;满量程的4.5%
- 驱动电路
为了获取传感器的模拟电压信号,使用反相运算放大器电路,如图4所示。不幸的是,已用于生成-5V的开关电容器电压逆变器(MAX828)在输出端产生了12kHz的噪音。LPF(低通滤波器)用于抑制放大器产生的高频噪音。Rs是力传感器。图4仅显示了一个传感器的电路,其他三个传感器与其相同。
图4:床传感器电路图
在该电路中,可以通过改变反馈电阻(Rf1)和/或驱动电压(-5V)来调节传感器的灵敏度,较低值的反馈电阻和/或驱动电压将使得传感器不太灵敏并增加其有效力范围。
- 模数转换和微控制器
微控制器的ADC转换器的参考电压为2.4V。因此传感器的最大输出应低于或等于2.4V。这可通过调节Rf1电位计(图4)来实现,因为驱动电压固定在-5V。ADC能以100KSPS的采样频率运行,这对该程序来说是足够的。SAR(成功接近寄存器)的转换时钟频率可以被编程至2.5MHz。
- 微控制器和RF模块
选择Silicon Lab C8051F020微控制器是因为其丰富的资源。它具有一个板载高分辨率ADC,具有8个多路复用输入通道[9]。微控制器运行22.1184 MHz的晶振,并在C中编程。数字I / O端口(端口6和7)用于将微控制器连接到LCD模块。微控制器具有两个UART(通用异步收发器)模块,其中一个用于与RF发射器接口。UART输出TTL电平的RS232协议串行数据;因此与RF模块的接口不需要任何附加的转换器。UART编程为以38400波特率,8位数据,1个停止位和无奇偶校验传输串行数据。
四、实验和结果
在本部分,我们介绍在实验室中进行测试的结果。测试开始于表征单个传感器,然后使用其中四个一起计算在负载在桌面上的位置。
- 传感器表征
使用25磅Flexiforce传感器,测量力-电压特性,如图5所示。
- 传感器表征
使用25磅Flexiforce传感器,测量力-电压特性,如图5所示。
图5:传感器的电压特性
对于相同重量分布的感测器的感测表面夹持在(带状)两个具有与主动传感器感应区域相同直径的金属圆盘之间。施加的负载从0.5kg渐进至11.5kg,每次增长为0.5kg。对于添加到传感器的每个额外重量,进行三次连续读数以检查其重复性。超过11.5kg时,传感器的反馈达到饱和。
- 使用四个传感器响应计算负载位置
在进行实验时,四个100磅的传感器(其为床所需)无法使用,因此在实验桌上使用25磅传感器来测试该算法的准确性和实用性。实验所用的桌子是一个平衡均匀的桌子,在每条桌腿上施加等量的力。四个传感器连接到四个桌腿的底部,如图6所示。
图6:实验设置使用表
传感器夹在与传感器感测区域具有相同直径的平面金属板之间。这些板用于确保等量的力分布到传感器感测头中的每个点上,同时还确保实验时桌子处于平坦的地板上,以使每个桌腿上所施加的力相等。
驱动电路上的电位计(Rf)调整为在空闲条件下所有传感器输出相同值。这也是必要的,以确保当力施加在传感器上时,所有的值以相同的速率增加且当在桌子上的通信点施加重量是显示相同的数值。
传感器连接到驱动电路,该驱动电路在施加力时按比例模拟输出电压,然后将该模拟输入发送到微控制器,微控制器中的ADC将其转换为数字输出,并将其显示在LCD上,如图7所示。
图7:LCD模块上显示的传感器响应(以克为单位)
图8:传感器1的响应情况
图9:传感器2的响应情况
图10:传感器3的响应情况
图11:传感器4的响应情况
图12:四个传感器输出的组合结果
如图6所示,将台的表面积沿着X轴(宽度)分成10个单元,沿着Y轴(长度)分成14个单元。以这种方式校准以获得传感器的精确反应,并观察在每个单元中施加的力如何影响输出。固定重量6kg用于测试传感器。在重量的底部使用薄的固体圆柱形基底,以确保整个力直接作用在台上的特定电池上。通过将重量放置在每个单元中并记录来自微控制器的传感器输出读数来获得力与电压结果。这对于输出如何反应作用于桌子上的每个点的力给了我们一个很好的思路。
图8至图11所示的表面发图是表上进行实验的结果。这些图显示了正在施加最大力的位置。力被绘制在垂直Z轴上,水平X和Y轴表示施加力的单元位置。表面颜色分布表示施加在传感器上的重量的量。
从图8所示的传感器1的图中,传感器的最高值为884,等于8.84 kgs。该值位于单元格X1Y1处,该单元格是附加传感器1的表格的腿的正上方的位置。该传感器的最小值在连接传感器4的支路上方的单元X10Y14处。这正如预期所估,因为当重量在其正上方时,传感器将显示最大值,当重量在距离传感器最远的点时显示最小值。
图9中所示的曲线是传感器2的结果。从该曲线图可以看出,最高值为大约700,其位于安装有传感器2的支路正上方的单元X1Y14处。在距离传感器2最远的单元格X10Y1处的最小值为225。
类似地,从图10中所示的传感器3的表面图可以看出,最大值在单元X10Y1处为845.该单元位于放置传感器3的表的腿的顶部。此传感器的最小值将位于传感器2上方的单元。
图11中所示的传感器4还示出了具有最高值888的类似响应,其处于连接到传感器4的支线上方的单元X10Y14处。此传感器的最小值位于Sensor1上方的单元。
如图12所示,曲线图显示了所有四个传感器输出的组合结果。
将该表校准并分成四个区域,称为Zone1,Zone2,Zone3和Zone4,如图13所示。
图13:区域分布
理想地,如果重量在桌子的中心点,传感器的响应,
S1 = S2 = S3 = S4 = Savg
其中Savg =(S1 S2 S3 S4)/ 4
为了检测重量相对于工作台上的区域的位置,使得微控制器程序连续监视来自四个传感器的ADC输入。重量位置根据以下关系计算:
如果(S1 S2)gt;(S3 S4),则重量位于上半部分(UH)
如果(S3 S4)gt;(S1 S2),则重量位于下半部分(LoH)
如果(S1 S3)gt;(S2 S4),则重量位于左半部分(LeH)
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137105],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

