
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
耦合映象格子中的相继故障
在复杂网络中,由初始冲击触发大的相继反映是很常见的。耦合映象格子是在过去的几十年中被广泛使用的复杂系统的动力学模型。在这里,我们探讨具有不同拓扑结构的耦合映象格子的相继故障。我们发现,相继故障比全局耦合映象格子更容易发生在小世界和无标度耦合映象格子中。
1.引言
许多真实存在的复杂网络中都有相继故障的身影。在2003年八月十四日美国历史上最大的停电就是一个典型的相继电网故障例子。初始冲击如何导致到整个网络崩溃以及在不同的网络中相继故障的特点是什么?虽然复杂网络中的相继故障趋势难以完全弄清,但是它必然受到网络结构与网络动态行为组件的影响。特别是,由于发现复杂网络的小世界和无标度特性,一些研究人员调查了复杂连锁故障现象与拓扑网络之间的关系。
过去几十年来为了模型化复杂系统的时空动力学行为耦合映象格子(CMLrsquo;s)已被广泛研究。在大多数这些研究中,通常被假定为耦合映象格子有一个固定的耦合(如全局耦合或邻耦合)拓扑。最近,一些研究人员已经开始研究动态行为,如同步小尺度或尺度耦合的CML研究拓扑结构。
在这项工作中,我们提出了一个以耦合映像格子为基础的相继故障模型我们研究了模型中具有不同的耦合拓扑结构的相继故障,包括全局耦合,小世界和无标度的耦合。我们发现如果外部的振幅在单节点上的扰动大于阈值,一个节点的故障足以触发整个网络崩溃。此外,我们发现,阈值在全球范围内的耦合映象格子远大于一个小世界或无尺度耦合映象格子。这意味着,相继故障发生在小世界无标度网络比全局耦合网络容易得多。
2基于耦合的连锁故障模型地图格
我们认为一个具有N个节点的CML的描述如下:
i = 1,2, . . . ,N (1)
其中是节点i在t时间段的状态变量。n个节点的连接信息是由邻接矩阵A=给定的。如果有节点i与节点J之间存在连边,那么;否则。在这里,我们假设没有两个不同的节点之间可以有一个以上的连边以及没有节点可以有与它自身相连的连边。因此,A一个是一个对称的0-1矩阵对角线元素为零。是节点i的度,它被定义为连接到节点i的边数。代表耦合强度。函数f定义的局部动态,这也是在这项工作中选择的无序的符号逻辑图形映射,。我们使用绝对值符号在Eq. (1),以确保每个状态总是非负。
如果,节点i就被认为是在正常状态下的M时刻的步长。换句话说,如果 然后节点i被认为是在M时间步长故障。然后,我们假设在这种情况下。如果网络(1)中每个节点的初始状态处于时间间隔(0,1)并且没有任何外部扰动,那么N个节点在网络中将永远处于正常状态。为了显示如何在一个单一的节点上的初始冲击可以触发级联故障,我们向节点C在M时间步长添加一个外部扰动R,具体如下:
在这种情况下,节点C将在M时间步故障,并且在所有的t》m情况下,都有在(m 1)时间步,根据式(1)这些节点直接连接节点C的状态将被影响,这些节点的状态也可能大于1,因此可能导致新一轮的节点故障我们感兴趣的问题是最终会有多少个节点故障?
在随后的模拟中,初始状态的节点在耦合映像格子(1)都是从区间(0,1)随机选择的。在第十时间步把扰动Rge;1添加到节点C。级联故障过程可以由I来表示,它被定义为在(t 1)时间步长之前的网络故障的节点总数。I测量了网络中级联的大小。
图1全局耦合映像格子的大小为I,N=2000,ε=0.6,给一个随机选择的节点添加扰动R。该数据是平均超过100次的实现。
3. 全局耦合映象格子中的级联故障
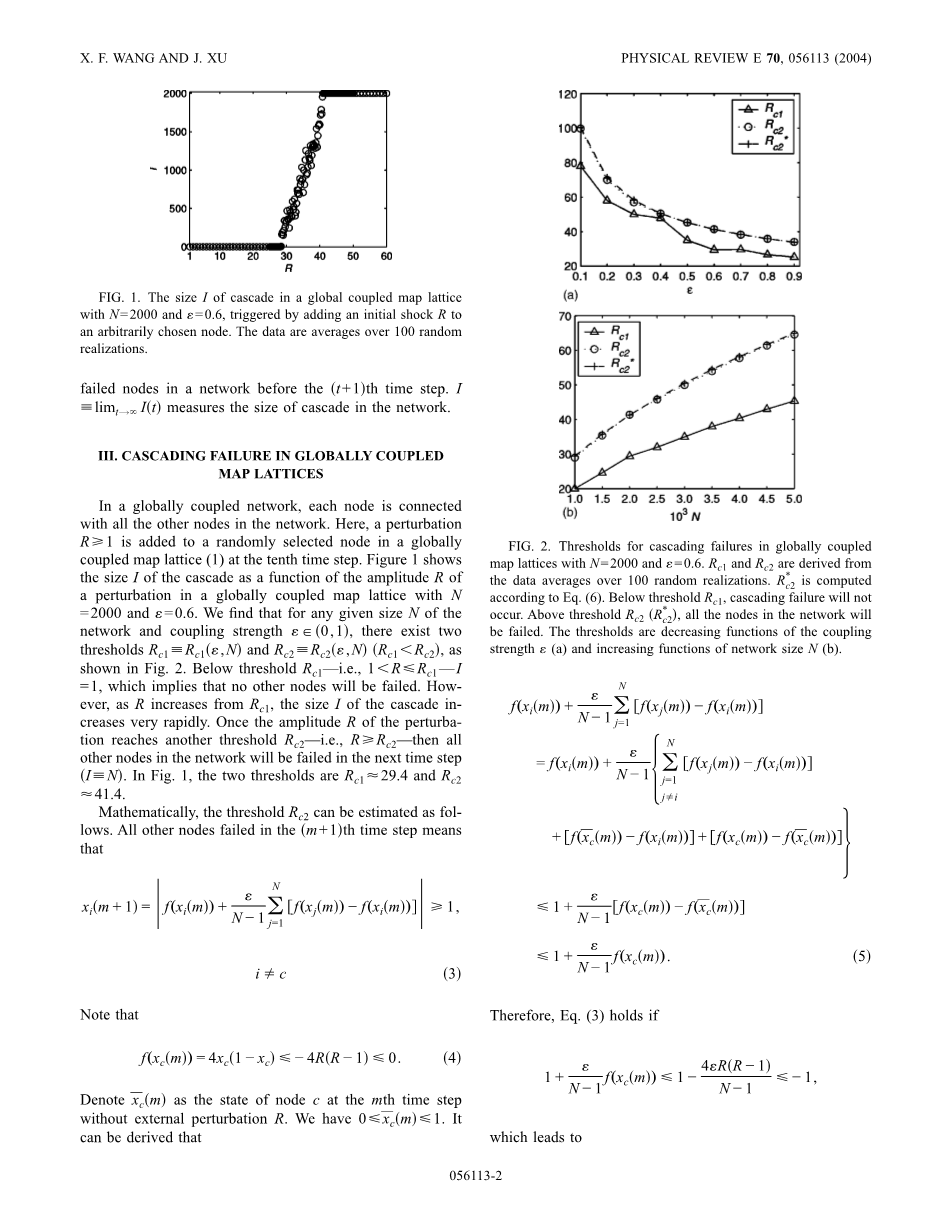
在一个全局耦合网络中,每个节点与网络中的所有其他节点连接。在这里,在第十个时间步长在耦合映象格子(1)的全网络范围内,一个扰动R 1被添加到一个随机选择的节点。图1显示了i大小的级联在全局耦合映象格子与N = 2000和ε= 0.6的振幅的函数R的扰动。如图二所示,对于给定的网络规模N和耦合强度εc(0,1),存在两个阈值和当1lt;Rle;Rc1,时,I=1,表明除了最初发生故障的那一个节点以外,没有其他节点发生故障.然而,当R由Rc1开始逐渐增大时,故障報模I会快速增加。一旦扰动R的幅度达到或超过另外一个阈值Rc2。即Rge;Rc2,网络中所有节点都将在下一时刻发生故障(I=N),在图一中,两个阈值的大小分别为Rc1asymp;29.4,Rc2asymp;41.4.。
現在导出阈值Rc2的解析表达式。所有节点在第m 1时刻发生故障意味着
此外
用表示没有外部干扰R的情况下节点c在m时刻的状态,则有,据此可以得到
只要
即
从图2可以看出,根据公式(6)估计的阈值Rc2与仿真所得的值Rc2*吻合得很好。
值得注意的是,当N→oo时,阈值Rc1,Rc2将 不断增加并趋向于无穷. 这就表明,规模非常大的全局耦合对较大的局部干扰具有很强的鲁棒性,几乎不可能发生全局故障。然而,尽管全局耦合网络体现了真实网络的某些特性,其局限性还是显而易见的:一个全局耦合网络包含N个节点和N(N-1)/2条边,但是绝大多数真实网络是稀疏的,其边数与N同阶,而不是与Nsup2;同阶。
图2全耦合映像格子中相继故障的阈值,N=2000,ε=0.6。Rc1和Rc2采自100个实现的数据。Rc2*是根据公式6计算的。小于阈值Rc1是不会出现故障的,超过Rc2(Rc2*)网络中所有节点都会故障。以上数据证明了N(b)与ε(a)。
图3在小世界耦合映象格子实现全球连锁故障需要的时间步长T与重连概率p具有函数关系。
4.小世界耦合映像格子中的级联故障
一个被广泛研究的,稀疏的,和普通的网络模型是最近邻耦合网络。N个节点分布在一个环上,并且在每个节点i的两侧,各有最接近节点i的K/2个邻居节点与之相连,这里K是偶数。在仿真中,取K=20,ε=0.6,Nge;1000。与全局耦合网络相似,在第m时刻随机选择一个节点,在其状态上加入---个外部干扰Rge;1。对于较大的干扰(Rgt;6),在第m t 1时刻以前发生故障的节点总数近似为I(m t)=Kt 1。因此,对一个包含 N个节点的最近邻耦合,所有节点发生故障需要的时间近似为N/K。当N→infin;时N/K→infin;。然而,在模拟中,由于算术溢出的发生,我们不能产生整个级联过程。
许多真正的网络具有特殊的功能,这是完全规则网络和完全随机网络的混合。为了描述从一个完全规则网络到一个完全随机的一个过渡,Watts和Strogatz提出了小世界网络模型。从最近邻耦合网络开始,有N个节点连接在环并且每个节点有K边,他们给每个边缘以概率p随机重连。Watts和Strogatz(WS)以特征路径长度L(p)和聚类系数C(p)量化这些网络的结构特性。L测量了两个节点之间的典型的分离(一个全局属性),而C测量典型的邻域的宗派(一个局部属性)。他们发现,当P特别小的时候(0lt;ple;1),L(p)快速下降,而C(p)几乎没有什么变化。随后的半随机格子表示一个小世界网络。在WS小世界网络,大多数节点只连接到他们的最近邻节点,但一些节点有远程连接相对较远的节点。在网络的总的远程连接数是pNK/2。
我们发现在小世界耦合映象格子比在最近邻耦合映象格子引发全球连锁故障容易多了。仿真参数取为N=2000, K=20,R=6,ε=0.6图3显示了小世界耦合映像格子中,达到全局相继故障所需要的时间T与重连概率p的函数关系。我们发现pge;0.05时Tle;7并且0.32le;ple;1时T恒等于4.图4显示了当一个随机选择的节点在第10个时刻受到外部干扰而发生故障以后,网络最终的故障规模I与扰动的幅度的关系曲线。我们发现,当Rge;5.5时,节点网络会在很短的几步之内故障。例如,当R=6时,网络中所有的节点都将在7个时序以内陆续发生故障,如图4所示。这说明小世界网络中那些少数的长程连接使得网络变“小”了,因此单个节点的故障可以很容易引发大规模的节点故障。
图4大小为I的小世界耦合映像格子,N=2000,K=20,P=0.05,ε=0.6。随机选择一个节点添加扰动R。数据超过平均100个实现。
图5小世界耦合映象格子中的相继故障过程,N=2000,K=20,P=0.05,ε=0.6,R=6.在第十个时间步给随机选定的节点添加扰动R。在七个时间步之后全部网络故障。
5.无标度耦合映像格子相继故障
一个最近在复杂的网络领域的重要的发现是观察到的一些大型和复杂的网络的连接分布有幂律,P(k)是网络中一个节点连接到其他k个节点的概率,G是正实数。因为幂律是无特征尺度,这样的网络称为“无标度网络”。Barabaacute;si和Albert (BA)认为,在无标度结构模型有实际网络的两个通用的方面,即增长与优先依附。他们提到的网络不断增长,增加新的顶点和新的顶点优先连接到现有的顶点与高数量的连接。BA无标度模型构造如下
(i)增长:从一个小数量的节点(m0),在每一个时间步,我们添加一个有m(mle;m0)条连边的新节点。
(ii)优先依附:当选择新节点连接的节点时,我们假设一个新节点将连接到一个节点的概率pi;取决于该节点的连通性。于是有:
I个时间步后的模式导致了无标度网络与N =l M0个节点以及ml条边。在模拟中,我们把m0=m。无标度网络的不均匀性:大多数节点很少有联系但少数特定的节点有很多的连接。正是这种不均匀的特征,使得一个受到蓄意攻击的无标度网络更容易发生故障,但是对于随机攻击更有鲁棒性。更准确地说,这样的网络的连接对于随机故障有高度鲁棒性,即,随机删除节点,它仍然对于攻击是非常脆弱的,也就是说,去除的是特定的高度连接的节点。
我们在BA无标度网络结构的参数确定中有N=2000,ε=0.6。基于这种度分布的非均匀性,引入两种引发相继故障的策略:随机故障和蓄意(基于程度)攻击。前者模拟网络中随机发生的节点故障,初始的扰动施加给随机选择的一个节点;后者模拟网络遭受攻击,攻击者一般总会选择那些相对重要的节点,因此在仿真里把扰动施加给网络中度最大的节点。图6(a)和(b)分別画出了在两种不同的引发相继故障的策略下,故障的规模I与扰动的大小R之间的关系图。在这个相继故障模型框架下BA无标度耦合映像格子中这两种策略得到的结果没有显著的区別,这两种情況下,都有比较相似的阈值RBA*。小于阈值时,只有少量的节点(在仿真中,一般不超过10个节点)会发生故障。当R超过阈值时,故障规模I会快速增加到N。值得注意的是BA无标度耦合映像中相继故障的阈值RBA*比同样规模、同样组合强度的全局耦合映像格子中的阈值Rcl小得多,这意味着与全局耦合映像格子相比BA无标度耦合映像格子中更容易引发全局相继故障。图7显示了无标度耦合映像格子,其中m=3,R=10的相继故障.以上的BA无标度网络相继故障的结果与Fortunato的发现一致。他研究了Krause Hegselmann的动态BA无标度网络传播的故障。Fortunato区别了三个阶段的置信限的空间,分别对应于零,部分,和总故障。此外,他发现故障的程度取决于损坏的节点的度而因为BA无标度网络的小世界效应,传播和饱和故障阈值与之无关。
图6无标度耦合映像格子大小为I,(a)是随机选择节点,(b)是有意选择节点。数据超过100次实现。
图7无标度小世界相继故障,N=2000,ε=0.6,m=3,R=10.在第十个时间步给随机选择的节点和有意选择的节点添加扰动R。
6.总结
在这项工作中,我们研究了相继故障的耦合映象格子的不同耦合拓扑结构,包括全局耦合,最近邻耦合,无标度和小世界的耦合。我们发现,在一个单一的节点上有足够大的扰动,可能会导致在网络中的所有其他节点的级联故障。在一个全局耦合映象格子中,相继故障发生的扰动阈值趋于无穷大另一方面,即使是很小的扰动可能在几步内就会在无标度和小世界耦合映象格子引发大规模的连锁故障我们希望这项工作可能会在现实世界中复杂的网络级联故障的分析和控制中照出一缕光芒。
补充翻译:
引言
我们研究了一类尺度耦合映象格子与不均匀的参数相继故障。我们发现,由于网络给予了高度的不均匀的,依权重蓄意攻击触发相继故障比随机攻击容易得多。此外,随着网络变得更加异构,网络变得更容易受到随机和蓄意攻击。因此,为了避免这种复杂的网络中的相继故障,网络的结构应该尽可能的均匀。
1介绍
许多真实的复杂网络中相继故障是很常见的。虽然大多数故障出现和消失在本地,一些却触发雪崩机制,对于整个网络系统可以有大的影响。一个典型的例子是2003八月在美国东北部的电力传输网络最大的停电事件。虽然在复杂的网络中的相继故障的趋势还远远没有完全理解,但是它必然是由网络的结构和网络组件的动态行为的影响。特别是,自从发现小世界和无标度网络的特点,各种连锁故障的复杂网络中的重要方面,已在文献中讨论,包括稀有事件的起源,蓄意攻击触发的级联,雪崩大小的分布、容错性和无标度网络的脆弱性,动力传动系统在停电和拥挤的不稳定性。
耦合映象格子在过去几十年中被广泛研究,因为其丰富复杂系统的时空动力学行为。最近,我们提出了一个基于耦合映象格子级联故障模型。我们研究了连锁故障模型中不同的耦合拓扑结构,包括全局耦合,由Watts和Strogatz提出的WS小世界耦合,由芭芭拉和艾伯特提出的BA无标度耦合。我们发现,单个节点的故障是足以引发整个网络崩溃,并且相继故障在小世界和无标度网络比全局耦合网络更容易出现。WS小世界网络是在均匀这个意义上,每个节点都有大约相同数量的连接。另一方面,BA无标度网络是异构的性质:大多数节点很少有联系但少数特定的节点有很多的连接。一个无标度网络的不均匀的特征使得网络连接强大的随机故障但易受攻击已被证明。对BA无标度网络的度分布服从固定的幂律指数。在这项工作中,我们考虑在一个无标度的CML模型的度分
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137205],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

