
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
武汉理工大学
基于扰动观测器的防抱死制动系统
多滑动面控制器
Vivek Sharma;Pratik Chaudhari;P.D. Shendge and S.B. Phadke
印度工程学院
摘要:本文针对防抱死制动系统(ABS)的车轮滑移测量问题进行了研究。车轮滑移必须遵循所需的车轮打滑—为此使用基于干扰观测器(DO)的多滑动表面控制器(MSSC)。DO与滑模控制器(SMC)集成,通过估计系统中存在的集总不确定性来增强系统的整体性能。通过考虑用于跟踪滑移率的不同情况,在MATLAB / SIMULINK中通过ABS的实验装置证明了所提出的方案的性能。
关键词:ABS;滑移率控制;程序;扰动观测器
1 引言
ABS的应用在汽车安全系统的控制与路面车轮的牵引接触。在汽车ABS在1970年底实施的ABS控制系统的主要目标是防止车轮制动时的锁定。ABS不仅提供了增强的控制车辆,但也减少了停在干燥和光滑的表面距离。为了保持车辆的稳定性和转向ABS通过控制液压系统来调节制动力,车轮打滑必须按照期望的滑移率。作用就是在汽车制动时,自动控制制动器制动力的大小,使车轮不被抱死,处于边滚边滑(滑移率在20%左右)的状态,以保证车轮与地面的附着力在最大值。
许多控制策略已应用于ABS控制车轮滑移测量,如报告中所述资料,基本上有两种主要的控制方法即滑移率控制和车轮减速度控制,在[1]中我们讨论了ABS系统。车轮减速控制不需要估计车辆速度,车轮减速可以很容易地通过测量使用简单的轮编码器脉冲,使用这个策略的难度是需要测量的加速度在每个时间点。而由于道路条件的变化,这种方法反而会降低ABS系统的性能。
在其他控制策略中,使用车轮滑移测量,因为它容易地借助于车轮速度传感器估计车轮角速度,但是车辆速度必须通过使用车轮速度传感器来估计。因此,车轮滑移测量需要估计不能直接测量的车辆的纵向速度,如在[2]中讨论的问题。PID控制在ABS [3]上实现,但它不能为系统提供足够的鲁棒性。[4]提出了一个由非线性不确定性组成的反馈控制律,这些不确定性将处理系统的输入约束并确保有界控制动作,但是由于道路条件的变化,系统变得脆弱。滑动模式控制(SMC)是最突出和鲁棒的方法之一,因为它增加了系统抵抗系统中存在的外部干扰和不确定性的强度。
SMC的缺点是限制系统性能的抖动现象以提高系统的性能,可以通过适当地估计不确定性和干扰来避免颤振现象。如果这些不确定性被适当地估计,则系统的性能将得到改善,为不匹配的不确定系统类建立了称为多滑动表面控制(MSSC)的控制方法;例如在[5]中讨论的不匹配的汽车发动机的速度控制。与处理集总干扰的其他控制策略相比,它是更好的。SMC的另一个缺点是在系统中产生的不连续控制律,但是可以通过合并估计方法使其减少。现在已知的存在着许多已用于测量系统中存在的干扰的控制方法,仅举几例如:自适应控制(AC);惯性延迟控制(IDC)[6];扰动观测器(DO)如[7]中所示;多个滑动面使用IDC讨论[8]。
在[8]中,MSS技术已被提出用于失配和不确定的非线性系统来调节制动转矩和车轮滑移。 所提出的控制器与IDC结合以估计干扰和不确定性。 基于多滑动表面控制的扰动观测器(DO)用于估计集中干扰,即:如[9]中所讨论的失配和系统中存在的匹配不确定性。
在本文中,将设计两个滑动表面,包括不匹配和匹配干扰。为了估计这些干扰,使用基于DO的MSSC来识别在存在不确定性的情况下的系统的状态。使用这种控制策略,系统在存在不确定性的情况下变得鲁棒,并且通过使用该技术也避免了抖动。
剩余的文件描述如下:ABS数学模型报告在第二部分,MSSC和DO报告在第三部分。在第三节中,对扰动观测器的控制规律进行了分析和设计,模拟的结果已经进行并在第IV部分中示出,最后,我们在第六节中设计了控制法,并在第七节中总结了该过程。
2 防抱死制动系统
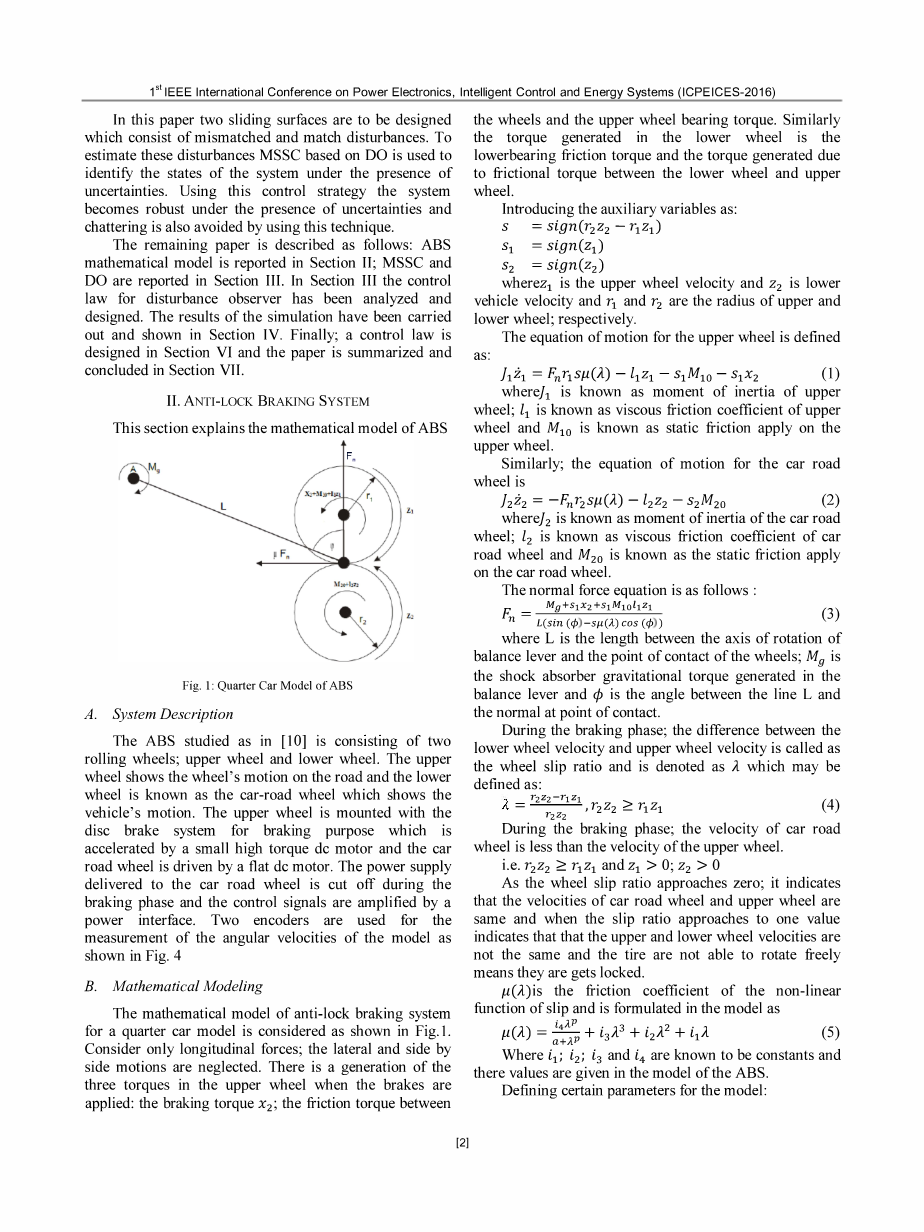
图 1:ASS的1/4汽车模型
(1):系统描述
这部分解释了ABS在[ 10 ]的数学模型——两滚轮;上轮、下轮。上轮显示车轮在道路上的运动和较低的车轮被称为汽车车轮显示车辆的运动。上轮安装制动盘制动系统,由小型高转矩直流电动机加速,汽车轮毂由扁平直流电机驱动。在制动阶段断开到汽车车轮的电源,控制信号由电源接口放大。两个编码器用于测量模型的角速度,如图1所示。
(2):数学建模
1/4车模型的防抱死制动系统的数学模型如图1所示。只考虑纵向力,忽略侧向和并排运动。当施加制动时,在上轮中产生三个转矩:制动转矩;车轮之间的摩擦转矩和上轮轴承转矩。类似地,在下轮中产生的扭矩是下轮摩擦扭矩和由于下轮和上轮之间的摩擦扭矩产生的扭矩。
引入辅助变量如下:
——其中是上轮速度;z2是下轮速度车辆速度;和分别是上下轮的半径。
定义上轮的运动方程如下:
(1)
——其中被称为上部的惯性矩轮;称为车轮上层的粘性摩擦系数;和被称为静摩擦作用上轮。
类似地,汽车车轮的运动方程为:
(2)
——其中被称为车轮的惯性矩;称为车轮的粘性摩擦系数,称为车轮的静摩擦系数。
法向力方程如下:
(3)
——其中L是平衡杆的旋转轴与车轮接触点之间的长度;Mg是平衡杆和1节中产生的减震器的重力力矩,是在正常接触点之间的线。
在制动阶段,下轮速度和上轮速度之间的差别被称为车轮滑移率,并表示为一个可以定义为:
. (4)
在制动阶段,汽车车轮的速度小于上轮速度:
当车轮滑移率接近零;这表明汽车车轮和车轮的速度上是一样的,当滑移率接近一个值表明,上部和下部的车轮速度并不相同,轮胎不能自由转动,意味着他们被锁。
是滑动摩擦系数和非线性函数制定模型:
(5)
是常数和有值在ABS模型。为模型定义某些参数:
(6)
通过使用以上提到的参数(1)和(2)可以配制成:
(7)
最后衍生出来的滑移是:
(8)
在[(A,Z2)和g(A,Z2)是:
制动时ABS模型定义为转矩给定的方程:
(9)
这里B(u)函数是由模型中定义的公式计算如下:
——其中和是在ABS中使用的常数模型。
(3):常规MSS和DO
植物动力学进一步简化为:
(10)
——其中集总不确定度和不匹配和匹配干扰这些干扰取自[8]。干扰包括非线性函数的不确定性。另一方面,匹配的扰动包括在每个信道中表示的不确定性:
(11)
(12)
3 控制器设计
基于扰动观察技术的多滑动表面方法已经用于设计控制器,该策略已经被分析和实现到一类非线性系统[11],存在于系统中的集总干扰由多滑动表面处理。
并且替换(7)中的A的值;
考虑第一滑动面:
(13)
(14)
其中a1gt; 0使用(11)、(14)和(15)集总不确定性可写为:
(15)
(16)
由于没有控制输入存在(10);所以考虑虚拟控制输入和利用以这样一种方式,它保证0的稳定性设计;现在设计的虚拟控制输入如下:
(17)
现在考虑第二滑动面:
(18)
(19)
使用(11)我们可以得出:
(20)
(21)
现在设计控制律:
(22)
在[12]中,通过使用惯性延迟控制器来实现不确定性的估计。本文关注的是在该干扰观测器(DO)的帮助下测量系统中存在的干扰和不确定性。它也实现在[13]; 这些类型的不确定性可以包括取决于道路摩擦条件的轮胎路面摩擦系数的条件和车辆的质量。不确定性的估计为:
(23)
区分(23)值域:
(24)
定义辅助变量PI 如下:
(25)
存在于信道1中的干扰估计的方程变为:
(26)
实际和干扰估计量之间的差称为误差,由下式给出:
(27)
区分(27)和使用(26):
(28)
如果严格为正,则将是稳定的,并且已知由一些恒定值限定,其中已知是正数。
类似地,对于的估计将遵循相同的过程:
(29)
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137233],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

