英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
可用于环境振动试验的利用加速度功率谱密度
对电动激振器进行简单的闭环主动控制研究
H.M. Gomes · D. dos Santos Gaspareto ·
F. de Souza Ferreira · C.A.K. Thomas
摘要:根据环境振动试验中规定的标准,展示了一种简单的电动激振器闭环主动控制产生加速度功率谱密度(PSD)的主要结果。其主要思想是,开始时产生符合规定功率谱密度的加速度伪信号,然后从电动激振器的振动台特性中获取加速度数据。计算得到加速度的功率谱密度与所需的PSD进行比较,然后对时变伪加速度进行更新,以反映修正后的PSD结果。研究发现,对于分段窄频段频率,电动激振器的加速度在频率和电压上均近似线性。研究开发了AgilentVee 7.5软件中的闭环主动控制信号采集、发送和处理代码模块。所使用的A/D D/A硬件是单片机声卡,具有特定的特性。该控制在48 KHZ和协助外部声音放大器的情况下,可以同时收发一个具有16位分辨率的范围plusmn;1.5 V的输入/输出电压。
关键词:主动控制、电动激振器、功率谱密度、声卡
引言
在不利条件下测试和使用的几种设备(主要是具有关键部件的设备)的可靠性普遍有提高的趋势,这是通过振动测试来实现的。因为这种现象会影响这些设备的耐用性和使用能力。本工作的主要目的是开发一种简单、廉价、可靠的系统,通过闭环系统,相对准确地控制电动激振器,然后用它进行环境振动试验。主要控制变量是激振器的加速度。需要进行最小化处理的函数是激振器的加速度功率谱密度与标准加速度功率谱密度在频域上的差值。
该系统可以进行机械疲劳强度测试、共振频率评估(通过正弦扫描或随机振动)、获得加速度场信号的复制、冲击强度、冲击、跌落和一般模态分析等测试结果。显然,这些试验的振幅和频率受系统(激振器和被测结构)机电性能的限制。
电动励磁系统(激振器)
激振器是以可控的方式对试件施加振动(已知频率的交替加速度)的装置。本工作的主要工作原理可以基于内燃机、液压机、气动或电动发动机(本实验)。
电动激振器的工作原理是利用线圈产生的两个相互作用的磁场所产生的电磁力。其中一种具有与外加电压成正比的磁场(电枢线圈),另一种具有静电磁场(磁场线圈)。有一个固定的电枢为现场线圈(励磁机底座)和另一个作用电枢进行耦合(通过一个爬行器)到一个支持测试样品的平台,其中主动控制中需要测量加速度。有几个标准指定了在振动台[2,3 - 5,9,16]而不是被测件上测量的加速度,主要是因为这个加速度代表了一个实验加速度的测量值。
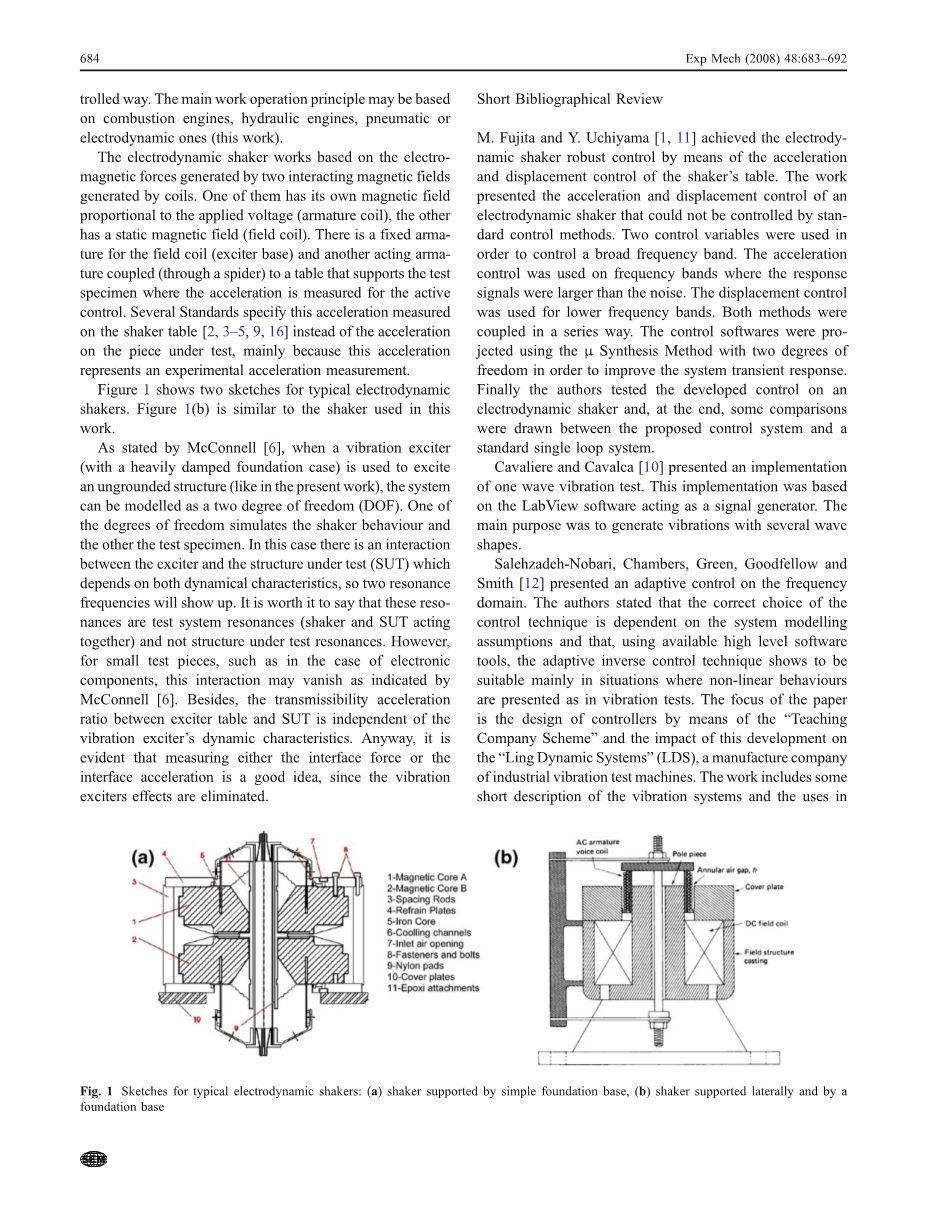
图1显示了典型电动激振器的两个示意图。图1(b)与本文使用的激振器相似。
正如McConnell [6] 所述,当一个振动激励器(带有一个严重阻尼的情况下)被用来激励一个未接地的结构时(就像在目前的实验中),系统可以被建模为一个具有两个自由度(DOF)的系统。其中一个自由度模拟振动器的行为,另一个自由度模拟试件的行为。在这种情况下,激振器与被测结构之间存在相互作用,这种相互作用取决于激振器和被测结构的动力特性,因此会出现两个共振频率。值得指出的是,这些谐振是测试系统的谐振(激振器和SUT共同作用),而不是测试谐振下的结构。然而,正如McConnell [6] 所指出的,对于小的测试件,例如电子元件,这种相互作用可能会消失。此外,激振台与SUT之间的传递加速度比与激振器的动态特性无关。无论如何,测量界面力或界面加速度都是一个明显的优秀的方法,因为它消除了振动激励器的影响。
简短的文献综述
M. Fujita and Y. Uchiyama [1,11]通过对振动台的加速度和位移的控制实现了电动激振器的鲁棒控制。介绍了一种不能使用标准控制方法控制的电动激振器的加速度和位移控制。为了能够控制宽频带,研究人员使用了两个控制变量。在响应信号大于噪声的频A段上采用加速度控制,而位移控制用于低频段,实验中两种方法以串联的方式耦合。使用mu;综合控制预测软件的两个自由度,以改善系统的瞬态响应。最后在电动激振器上对所研制的控制系统进行了测试,并将结果与标准单回路系统进行了比较。
Cavaliere和cavalca[10] 给出了一个单波振动试验的实现方法。这个实现是基于将LabView软件作为一个信号发生器。其主要目的是产生几种波形的振动。
Salehzadeh-Nobari, Chambers, Green, Goodfellow和Smith[12]提出了一种频域自适应控制。作者指出,控制技术的正确选择依赖于系统建模的假设,并且需要使用现有的高级软件工具。自适应逆控制技术主要适用于振动试验中出现非线性行为的情况。本论文的重点是利用“教学公司方案”设计控制器,以及研究该开发对工业振动试验机制造公司“Ling Dynamic Systems ”(LDS)的影响。工作内容包括对振动系统及其在工业上的应用进行了简要的描述,并对所使用的算法的选择及在具体硬件上实现的主要步骤进行了说明。
图1 典型电动激振器示意图:(a)简单基础底座支撑激振器,(b)侧向基础底座支撑激振器
Flora和gruninging [13]提出了一个趣味性的工作,它展示了正弦振动测试使用开关模式交流电源—ACPS与电动振动器作用下,数字加速度控制器的发展。其所使用的电动激振器生产厂家、型号、承载能力与本工作相同。该方案基于两个控制回路的相互作用:一个用于加速度调节,另一个用于ACPS电压输出。该方法采用鲁棒控制算法(鲁棒模型参考自适应算法—RMRAC),以减少系统变化对系统的影响,减少试件的谐波和谐振振动。并对加速度控制器进行了改进,设计了前馈控制器和鲁棒控制器。实验结果表明,该系统在20HZ ~ 1kHZ的标准频段内性能良好。
Muoutinho等人介绍了一种主动控制系统的实现方式,该系统应用于振动台,用于在缩尺试样上进行地震振动试验。根据作者的观点,这种控制系统的使用是为了给振动台施加一个先验运动,这个运动主要依赖于振动台与试样之间的相互作用以及与实验测试相关的随机现象。摘要介绍了LabView中提出的主动控制的工作原理和实现方法,并与两种不同的控制策略进行了比较,一种是采用比例微分积分控制器(PID),另一种是采用预测控制器。该控制器的实现设备:振动平台、单向电动励磁机APS、ELECTRO-SEIS 400型、自适应铝表模型。总的动态质量限制为12.32 kg。与预测控制器相比,PID控制器在评估期望的测量响应(特别是在突然运动变化时)方面的效率要低得多,几乎是最大振幅负载控制方面的最大值。然而,它不需要一个数字模型来生成预测控制器中所需的控制动作。
振动设备和试验要求
现代振动系统主要由三部分组成:振动激励器、放大器和控制系统。振动激励器将施加在试件上的振动运动的电能进行转换,通常是在研究试件在正常运行时的损伤演化方面提供方法。放大器将来自线性电源的功率转换为所需频率和振幅的电信号。控制器监测振动试验,输出激励器台的加速度,并为放大器提供足够的输入信号。
振动放大器需要一些在一般应用中不需要的特性。此外,为了获得足够的负载比,需要放大器从阻抗的交变电平上来耗散和吸收无功负载,此时可以采用适当移动振动激励器放大器来实现此功能。畸变是一个严重的问题,因为畸变本身就容易对试件造成损伤。因此,在谐振能激发激振器基频的关键区域,放大器的畸变应控制在3%以下或2%以下。现在,这些要求已经很容易通过几个音频放大器来实现。McConell [6] 指出,振动型放大器有两种工作方式:电压模式和电流模式。由于在SUT的非接地固有频率处发生的力损失不太明显,后者比前者具有优势。例如,在疲劳试验中,前者的工作模式表现出更好的性能。但是这种模式只允许测量整体系统的行为,而不是SUT的行为,研究中又需要评价SUT的固有频率和阻尼,所以这种模式有缺陷。
图2 伪加速度波形的生成
图3 实验设置方案
现代激振器的主要任务来自几种可用的控制器系统。这些任务可以分为两类:周期振动和随机振动。
设备的周期性振动是其失效的主要原因。实验室正弦激励对这种周期性扰动的模拟在故障或耐久性试验以及诊断试验中屡见不鲜。由于正弦振动对目标的损伤是由于共振效应放大造成的,本文对在此周期振动的仿真进行了说明。
为了进行固定频率振动试验,应对试件的固有频率进行评估。测试将依次对测试样本的每个固有频率进行测验。这种试验可以用来评估实验对象在共振频率作用下的疲劳强度,评估结构的阻尼比,调查设备噪声源,应用设备或其他结构。在固定正弦频率上进行振动测试的设备非常简单,因为要放大的输入信号可以通过一个简单的信号发生器得到。一些辅助设备也很有用,如用于振幅控制的设备,用于线圈位移和加速度测量的设备,用于快速移动振动台的设备,可以模拟脉冲阻尼振动。
正弦扫描振动试验可以用来充分模拟损伤的增长(通常是由于不平衡造成的此现象)。由于频率是通过大频带频率扫过的,大多数谐振振型都可以根据其严重程度进行激励和评价。这些测试用于地面车辆、船只和飞机,因此测试将以最低的消耗成本依次扫描每个频率。
与高空飞行器飞行有关的喷气发动机的随机振动要求有新的设计准则和新的测试程序来保证设备在这种环境下的可靠性。当在现场测量随机振动时,该信号可以作为边界参数来确定需要达到的可靠度标准。有时,工作环境的实际加速度信号并不是表征这种振动的最合适的方法,此时后者可用于振动器或励磁系统的加速试验。此外,还有其他一些干扰因素,并且由于存在一定程度的随机性,这些信号可能不会再次被复制。详细描述这类信号的最佳方法之一是通过实际加速度得到的加速度功率谱密度(PSD)。PSD是由兴奋频域的频带频率定义的。下图给出了加速度PSD图和频率图。
图4 ADXL 150/250的典型输出响应与频率的关系
图5 电控测试系统框图
有许多处理动态测试的标准(每个公司或供应商制定自己的最低要求)。但需要注意的是,以加速度功率谱密度作为随机振动试验的标准是全球性的趋势,主要表现在环境振动试验中。
加速度功率谱密度可以用所需要的自相关信号的傅立叶变换来计算。即:
其中Ra(t)为加速度自相关函数,i为虚数,w为rad/s单位的频率,t为时间间隔。Ra(t)也可以通过以下方法进行评估:
其中符号E[.]表示均值,N表示样本量。零均值过程自相关函数的一个重要特征是[8]:
,因此下面的关系式也成立:
即:加速度过程方差是光谱密度对频率的积分。
该标准一般规定其单边形式的功率谱密度,例如已经被指定为正频带的功率谱密度。由式(1)可知,功率谱密度的定义采用无穷大上下限,所以单侧功率谱密度的定义如式(4)所示:
伪加速度信号的产生可以用正弦级数表示,如式(5)所示:
功率谱密度除以N的频率间隔Delta;w和相位角度,每个中心频带wi是随机值,这个过程应该是一个叠加正弦周期过程[15]。图2展示了这一过程的示意图。
为了实现加速度PSD的正确采集,在频率分辨率的选择、采样率和采集总时间方面都需要注意。具体地说,对于一个给定的标准PSD上下频带限制,应该满足其获得的总时间不少于三个周期(如用于这项研究)的最低频率分量和采样率,并且应使离散最高频率分量在10或以上(本研究中适用)。
图6 标绘加速度功率谱密度times;频率[2],字母代表设备严格条件
图7 在AgilentVee中生成的程序流程图
根据标准PSD形状(平滑或由连接线组成),用于离散标准PSD和生成伪加速度信号的点的数量可能有所不同。在本研究中,它与获得加速度PSD定义的数值相同,因此,可以逐点比较所获得的PSD和标准PSD,或者使用不同频段(八度、1/3八度等)进行比较。
图8 激振器的典型加速度与频率曲线
设计方法及实验测试
实验仪器
对使用过的设备作简要介绍。使用的振捣器是德国TIRA振动测试系统的St. 5000/300型号。根据设备数据表,其有效工作频带范围为20HZ ~ 5KHZ。最大位移为plusmn;6.0毫米。最大应用负载2940 N。设备可移动质量,包括台面、电枢和固定装置,总计8.5公斤。最大允许试样质量(包括可移动质量)为60.0 kg。振动器有一个内部电阻4Omega;,它设计的最大功耗500 W(RMS)。所使用的信号放大器为WATTSOM公司的DBK- 6000型,它有两个放大的通道,各通道输出功率电平为375 W(交流:230 V), AB类。数据表显示放大器的频率响应范围为15HZ~ 40KHZ。在频率为20HZ到1KHZ范围内,总谐波失真和噪声(THD N)在8.0Omega;不到0.05% ,THD N在20HZ到20 kOmega;范围内输入阻抗不到0.1%。输入阻抗(不平衡)是20kOmega;,信噪比(S / N-without权重)大于90分贝。
使用的板载声卡是瑞昱ALC650 / AC′97。其信噪比在相应的频率范围内大于90dB。它有六个通道,其中AD使用16位分辨率,DA使用20位分辨率。输入和输出限制为plusmn;1.5 V,输入信号工作频率范围从20 Hz至48 kHz,输出信号是20HZ到8000KHZ。图3显示了使用过的设备进行的实验设置。
用于采集、处理和控制的软件为AgilentVee 7.5 [7,8]。
所用加速度计为模拟装置 [17] 生产的低成本MEM型(电容型ADXL 250)加速度计。最大输出电压为2.5 V,加速度为500(50g)。它测量plusmn;500两正交轴,灵敏度为 76.0 。图4显示了ADXL 250加速度计的典型频率响应。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18397],资料为PDF文档或Word文档,PDF文档可免费转换为Word

