英语原文共 20 页,剩余内容已隐藏,支付完成后下载完整资料
Cb-TRAM:利用多通道METEOSAT-8SEVIRI资料跟踪和监测从快速发展到成熟阶段的强对流
摘要
Cb-TRAM是一种新的全自动跟踪和实时广播算法。强对流细胞的检测、跟踪和鉴别涉及到开始阶段、快速发展阶段和成熟阶段。探测依据的是来自宽带高分辨率可见光、红外线6.2毫米(水蒸气)和红外线10.8毫米通道的METEOSAT-8 SEVIRI(旋转增强可见光和红外成像仪)数据。此外,还利用ECMWF运行模式分析得到的对流层顶温度数据作为自适应检测判据。该跟踪基于当前检测和前一时间步预测的细胞的第一次猜测模式之间的地理重叠。一种新的图像匹配算法提供了近似微分云运动的全场,从而获得了第一种猜测模式以及短期预报外推。在这些运动矢量场的基础上,对卫星数据进行内插和外推,生成两个已知场之间的合成中间数据场,以及运动和探测区域发展的近景预报。应用CB-TRAM的实例,以及将降水、雷达和闪电数据作为独立数据源的比较,说明了这一新技术的能力。
介绍
雷暴一直是影响社会经济的基本气象灾害之一。地面和空中运输、建筑和能源工业以及各种户外活动都依赖于对雷暴发展和传播的早期预警和正确的预报。
虽然由气象服务部门操作的常规数值预报在预报与天气扰动有关的雷暴复合体的传播方面显示出一些技巧,但总的来说,这些预报一般不能预测个别雷暴的发生和路径。主要原因是模式场对小尺度大气状态的描述不准确,特别是水汽和水流星的分布,以及云的动态和微物理状态。此外,实际网格分辨率还远远不能直接模拟云物理过程。此外,雷暴产生和传播的过程往往具有复杂的相互作用,在不同的尺度,如大尺度强迫天气尺度系统,边界层过程,如对流和湍流,由于太阳辐射,热量和湿度的通量,导致地面能量的转换。
因此,长达2至6小时的短期预报(也称为“近距预报”)主要是基于对时间上近实时观测的适当外推。从闪电、雷达数据中的降水模式或卫星数据中的云图等观测开始,探测和跟踪个别雷暴。然后利用来自过去发展的信息来估计未来的位置和增长,有时使用来自数值模型或概念对流生命周期模型的补充数据。
在过去的20年中,开发了大量的近距离预报工具,提供强风和强降水的短期警报,以及对流云系统的生命周期气候学。很早就有人试图从两幅连续的雷达图像中确定降水回波的运动,并得到它们在不久的将来的位置外推(例如, Ligda 1953).在卫星图像被利用之后不久,也得到云的运动(例如,Fujita,1969年)。然而,目前的大多数技术都是基于这两种近乎实时的信息来源。
已经开发出一组雷达回波跟踪技术,例如Titan(Dixon和Wiener,1993年)、COTREC=TREC(Mecklenburg等)。Conrad(lang,2001年),TRACE3D(Handwerker,2002年),TRT(Hering et al.。),或与闪电数据相结合(Steinacker等人。(2000年)。利用实时雷达资料进行暴雨跟踪的优势在于,降水回波可以可靠地探测雷暴内的活动对流核。然而,在达到降水阶段之前,不可能探测到发展中的对流细胞。此外,提供超过当地覆盖范围的雷达网仍然局限于西欧和北美,即使在这些地区,主要由于地面屏蔽,完全的空间雷达覆盖也得不到保障。
提供全球数据覆盖的近实时信息的替代来源是卫星数据。与雷达回波相比,对这类数据进行对流活动区域的检测是一项比较困难的任务。这主要是根据红外热观测中的温度阈值来实现的,其中最冷和最高的云顶,可能来自对流,可以与较温暖、较浅的云区分开来。例如,Machado等人。(1998年),Riosalido等人。(1998年),吉祥物(Carvalho和Jones,2001年),RDT(Morel和Senesi,2002年),Bolliger等人。(2003年),或Feidas和Cartarlis(2005年)。
然后,从上述跟踪技术中获得的雷暴细胞运动信息被广泛用于预测其未来的位置和强度,国家气象局通常以一种操作的方式来预测其未来的位置和强度。此外,越来越多的努力将雷达和卫星数据的优点与其他近实时观测(如闪电数据)以及数值或概念生命周期结合起来。 LE模型,以形成所谓的“专家系统”(例如,英国大都会办公室,甘道夫皮尔斯等。2000年;NCAR汽车-Nowcast Mueller等人。(2003年)。
本文介绍了一种用于雷暴发展早期探测和强活动对流跟踪的新工具:CB-TRAM算法(Cumulonim Bus Tracking And Monitoring),该算法基于METEOS-8 SEVIRI仪器的卫星数据。该算法集中于利用METEOSAT第二代=METEOSAT-8 SEVIRI仪器所提供的新功能,在降水开始之前和在没有雷达覆盖的地区探测对流。
上面列出的基于卫星的工具几乎完全基于来自11毫米红外热通道的数据,从而提供了对昼夜差异不敏感的检测。对于218~245 K的红外亮度温度,检测大多采用单一的固定温度阈值。因此,这些技术在解释不同天气或季节情况以及区分对流和非对流云系统方面存在问题。对流温度低于温度阈值。
为了改善其中的一些问题,这项工作强调了对潜在的对流活动的早期探测,以及对风暴细胞中的快速发展的探测,它仍然比经典的阈值更温暖。 将严重对流活动的区域与广泛的卷云盾牌分离开来。为此,使用来自SEVIRI高分辨率可见光通道(HRV)以及红外6.2毫米“水汽”通道(WV)的附加信息。
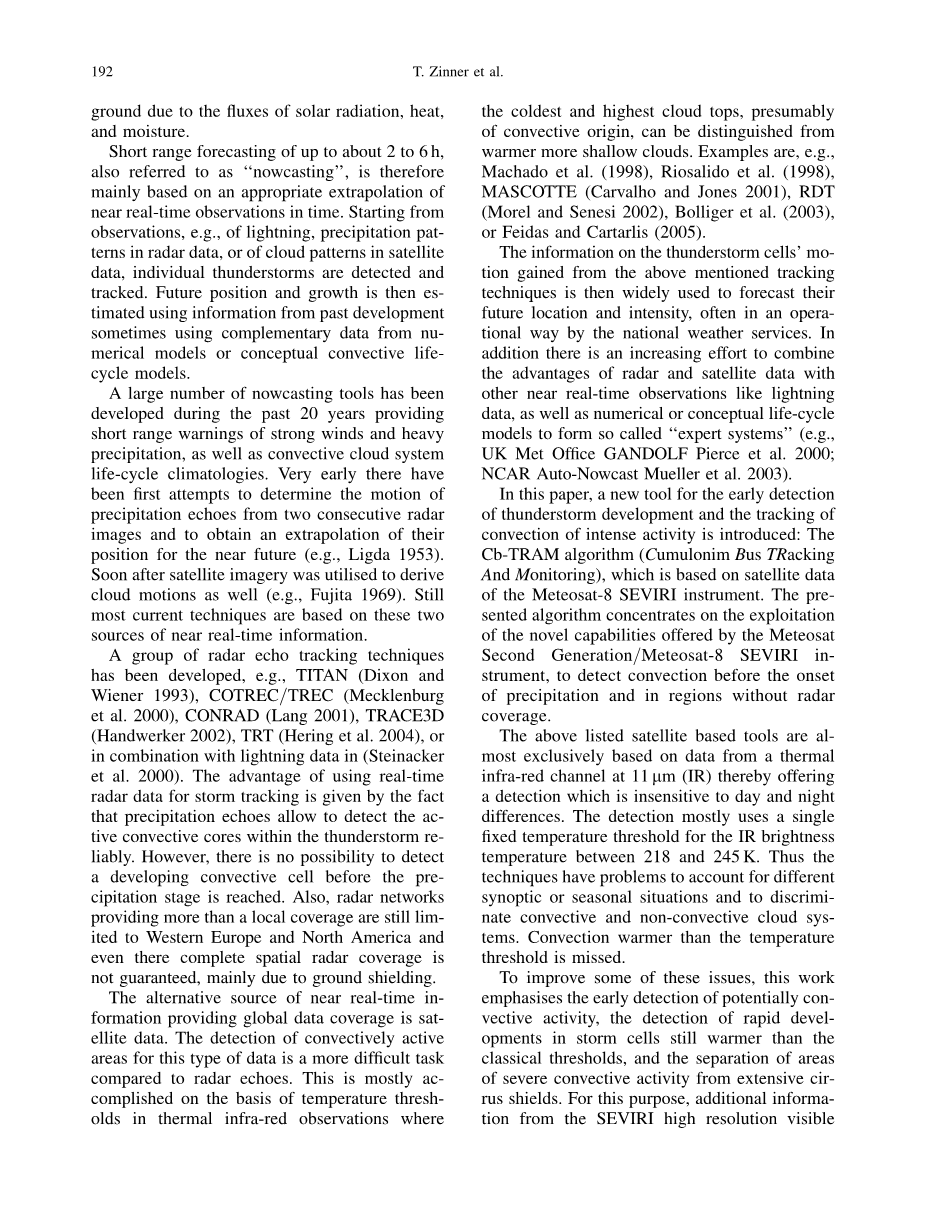
图1.2005年6月24日气象卫星-8 SEVIRI数据,(a)14 UTC,通道:宽带HRV(中欧分辨率约1.5公里);(b)WV 6.2毫米和(c)红外10.8毫米(均为标准分辨率a) 每像素约5公里)
由于使用了再折射的太阳辐射,因此从白天到夜间的检测算法的适应性是不可避免的。这就可以最大限度地利用有关检测对流的早期阶段的卫星数据,而对流的早期阶段主要是在白天触发的,并可区分非活动云场中对流活跃的区域。此外,利用短期数值天气预报或ECMWF业务分析资料的对流层顶温度自适应技术取代了上述固定阈值原理。
CB-TRAM工具由以下部分组成:
- 该算法的核心是从描述云运动和局部云发展的两幅连续卫星图像中提取一般变换或视差矢量场。
- 该探测分析了来自三个通道的当前卫星数据,并识别了对流活动的细胞形态。
- 跟踪和监视(Tram)将在不同时间步骤中检测到的单元模式彼此链接,并创建带有检测模式信息的单元历史日志文件。
- 显示例程读取此文件并绘制可选择的信息,如单元格模式的范围、其过去的轨迹或当前卫星图像顶部的外推位置。
在这里和整个论文中,“细胞模式”一词被用于我们的卫星算法可以探测到的对流物体。事实上,它可以包含多个真正的对流单元,因为该技术仅限于卫星仪器提供的空间分辨率和信息。
这一算法在第二节中被提出。对快速对流发展或成熟雷暴细胞模式的检测在第三节中进行了描述。第4.1节介绍了用于跟踪确定的单元模式的技术。绘图程序在第五节中进行了演示。并列举了一些应用实例,包括将探测到的对流单元模式与降水、雷达和闪电资料进行了比较。图1显示了一个数据基础的例子,HRV(宽带可见),WV(红外线6.2mm)和IR(红外线10.8mm)SEVIRI数据。卫星数据以太阳反射率或红外线亮度温度的形式提供.
“运动”场的提取
检测和跟踪例程中的第一步是从两个连续的图像中确定运动矢量场。这个问题与从立体图像对中推导出的差异是相同的,只有解释不同:在我们的例子中,差异来自云的运动,而不是观点的变化。与视觉解释相类似,第一个自动图像匹配器,就像那些仍然在云运动矢量确定中使用的一样(Schmetz等人)。;Menzel 2001),都是基于特征的。在第一图像中选择感兴趣的云模式,并在第二图像内的目标区域中搜索。这种匹配器的优点是计算的精力集中在几个项目上。明显的缺点是,只导出了几个单独的运动矢量,并且这些运动矢量中的每一个都是独立于其他运动矢量的。由于计算速度不再是一个限制因素,这里使用了一个基于区域的图像匹配器。匹配的结果是在图像的每个像素位置上定义的视差向量场~V,通常称为“光流”。这个场V描述了一个图像到另一个图像的扭曲,其方式是使图像强度的差异最小(经典光流)或使局部相关性最大。在文献中可以找到各种不同的计算光流的方法(Lucas和Kanade 1981,霍恩和Schunck 1981)。在下面,我们将描述一个通用匹配器的实现。
2.1金字塔匹配器
云场和云场具有很强的空间自相关性,小尺度特征的运动往往以大尺度流为主。为了考虑到这种比例依赖性,我 从低分辨率到高分辨率依次分析了MAGE对-金字塔格式(图2)。在图3A和图b中,给出了一个简单的移动结构的例子。最初,图像A和B是以前的 两个图像维数都趋向于2N倍的维数,N是金字塔的附加次采样级别的数目,从而允许逐步(金字塔)处理。图像 对于所有金字塔级别,SA和B被分采样到选定的维度(比较图2)。两个次采样图像之间的视差矢量~V场现在是通过连续地将图像A移到asequiv;Aequiv;~Pequiv;~Si;jequiv;by~Si;jequiv;2.2像素并与图像B进行比较来确定的。图4显示了两种图像之间的25次比较的结果。
我们示例的最高级别。对于每个图像像素~P,与分辨率相关的增量移位~S匹配I和提供图像B(~P)最佳拟合的~S匹配j存储在~V中。
实施的是两种不同的质量标准,以求最适合:
(默认)在感兴趣的图像像素的局部环境中亮度的平方差(可能是反射率或亮度温度)的最小值。
局部相关系数的最大值。
这两个领域的质量标准的定位是通过加权的高斯滤波器(图5)。这意味着,第一个准则就是低通滤波的平方差计算。 作为卷积
Ke是高斯核。根据这一标准,图4中的像素被标记,显示了所有25种比较中最低的dloc。
为了描述局部相关系数,有必要引入图像A的平均值Aequiv;A Ke的局部版本和图像A的局部“标准差”作为:
然后,图像A和B的局部相关系数cloc如下
“,”象征着逐点乘法运算。
Mannstein等人首次使用了均值、标准差和相关系数的局部旋转对称版本。(1999)用于其他图像处理任务。它们相对于使用未加权矩形区域来计算这些量的优点是,人工的高频制品(来自矩形滤波器边缘的)被抑制。此外,匹配器的性能在沿轴和对角线图像方向之间没有变化。
使用一个局部化的标准之一,DLOC为所有以下应用,获得视差向量场~V,最初为最顶层金字塔级(图3C)。如果没有发现极值,则假定为零位移。应用经过平滑、缩放和插值到原始图像分辨率的矢量场,图像A通过创建:
图3c显示了经过最顶端金字塔处理后的扭曲图像A0和视差矢量~V。两个相邻方格的测试结构被移动到近似的目标位置3D。当匹配以低分辨率开始时,整个云结构会发生偏移。不进行二次采样的匹配图像分辨率(没有金字塔级)将限制可探测位移的最大区域,在传统匹配器中称为“搜索半径”,从而限制了可检测位移的最大区域。 导致错误的视差矢量:图3a中的右上方对象将与图3b中的左下角相匹配。插值还会为V创建非整数值。我们用双线性插值法对A中的Arsquo;值进行了采样。新的Arsquo;现在取代原来的图像A,并被用作匹配的起点,在下一个金字塔级别。从每个级别产生的差异被添加到~V中,直到完全分辨率图像匹配为止(图3e)。在这种金字塔结构下,“搜索半径”至少由像素表示(角到角的大小为偶数),因此与最高金字塔层有关。
使用四个金字塔级(N=3),可以检测到至少32个像素的移动。对于时差为15min的中纬度MSG红外和水汽图像,这相当于速度超过360公里/小时的云或大气运动。搜索半径也受到原始图像大小的限制,因为如果内核Ke未被图像数据完全覆盖,则会产生边缘效应。在这个应用程序中使用的匹配器内核的大小为7 X7像素。在第三个金字塔层,它覆盖了原始图像的56X56像素。因此,根据运动的方向,在图像的每个边缘的外部大约50-80像素处,对大位移的检测是有限的。因此,图像边缘被排除在所有以下应用的分析之外。较小的核会导致更多的错误,即错误匹配,较大的核会减少图像中有用的部分。
该匹配器的结果是视差矢量场~V~P和扭曲图像A0~P,以尺度依赖的方式解决了光流问题。准确地说,这个向量场不是一个纯云图位移场,而且还包括云图的所有局部变化(例如,面积变化)。对于以下应用程序,必须记住这一点。
2.2图像扭曲和变形
图像A在图像B上的扭曲是在等式4中给出的.这种技术也可以用于考虑运动的插值,也就是所谓的变形。为了获得每个像素的信息,不仅要考虑视差向量场,将图像A映射到B上,还要考虑向量场,它将B映射到A上。 类似但不完全相同的。
利用这些向量,我们计算出第一幅图像在相对距离d处的插值图像D为:
当因子dgt;1时,可以外推发展。虽然变形插值在可用的时间步骤(如缺失图像)之间生成额外的卫星图像是有用的,但外推法可以用于近场广播。 探测到的对流细胞模式的短期前景。
探测
下一步是探测雷暴发展的不同阶段。不同的“发展阶段”归因于探测,根据它们对实际雷暴活动的重要性-第1阶段-对流低层云的强局部发展, 阶段2-用于快速冷却,或-第3阶段-用于检测成熟的积雨云.通常以浅层积云场为标志的低层辐合的早期探测被认为是引发对流的最清晰的警告信号之一(Purdom 1976;Wilson和Mueller)。 Wilson等人,1993年。(1998年)。有了SEVIRI HRV通道,一种前所未有的操作传感器可用于这一目的。重复周期仅为15分钟,空间分辨率约为1.5公里,1.5公里(用于中欧) 理想的探测快速的局部尺度发展的开始对流(也见Bugliaro和Mayer,2004年)。由于不是每一次探测到的腐殖积云的发育都会导致积雨云的
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18837],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

